I first heard about the Fabric Foundation while scrolling through updates on decentralized infrastructure projects, and my initial reaction was one of skepticism. I assumed this was just another blockchain layer trying to shoehorn crypto into AI and robotics without addressing the messy realities of hardware in the real world. After all, we've seen plenty of DePIN ideas that sound revolutionary but struggle with practical execution. What shifted my view was diving into their protocol documentation and seeing how they tackle capital allocation for physical assets. It wasn't abstract tokenomics; it was a thoughtful approach to funding and operating robots collectively. This led me straight to the economics of robot leasing in the Fabric ecosystem, where decentralized participation could redefine how we deploy automated labor.
The robotics industry faces a core challenge: deploying robots at scale is capital-intensive and operationally complex. Imagine a logistics company wanting to automate warehouse tasks—buying humanoid robots outright could cost hundreds of thousands per unit, plus ongoing maintenance and integration. Leasing helps, but traditional models lock you into centralized providers with opaque pricing and limited customization. How do smaller players compete? This aligns with broader Web3 narratives around AI integration and real yield. As AI agents become more autonomous, we need economic models that distribute costs and rewards fairly, avoiding the silos of big tech. Fabric's approach ties into this by creating a network where robots aren't just tools but economic participants, generating verifiable yields through task completion rather than speculative hype.

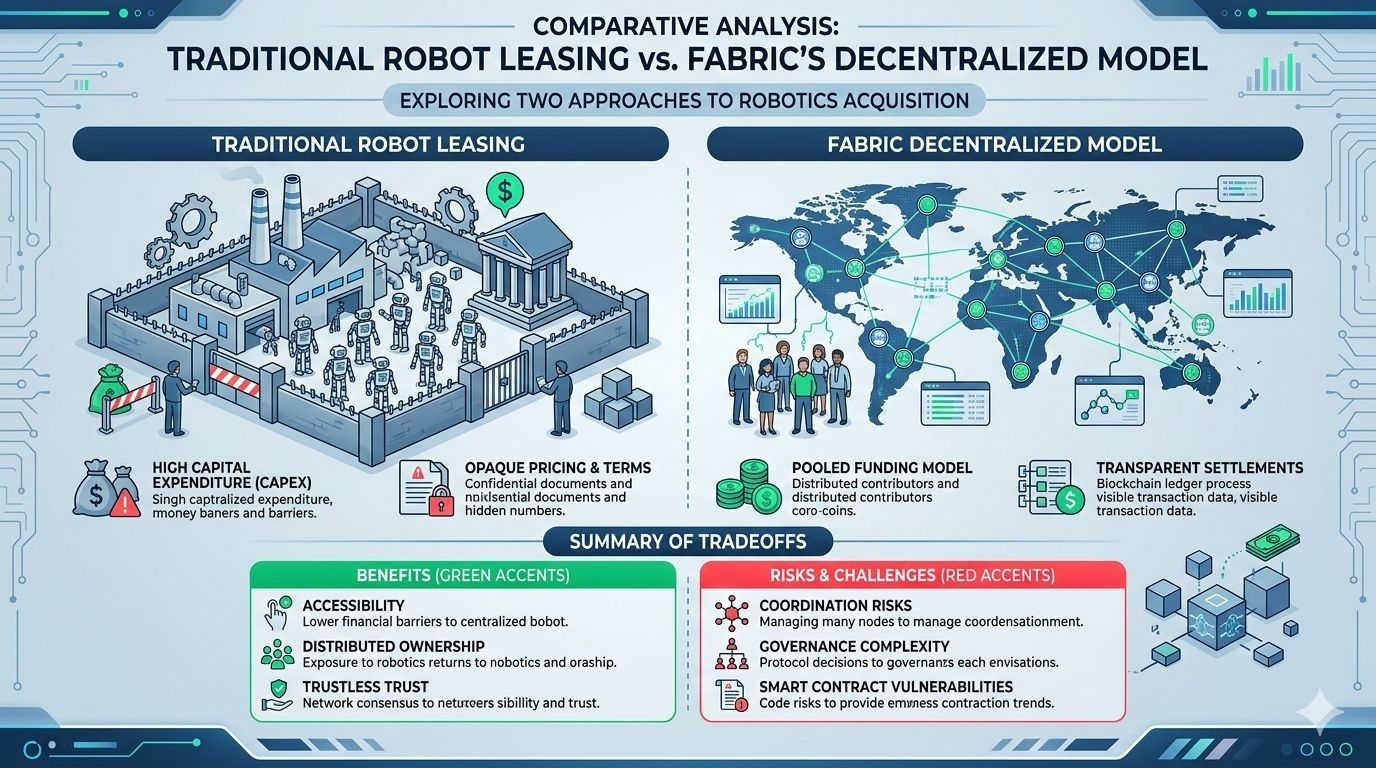
In the Fabric ecosystem, robot leasing operates through a decentralized coordination layer. It starts with users depositing stablecoins into pools that fund the purchase and deployment of robot fleets. The community then takes on operational roles—think charging stations, maintenance schedules, routing algorithms, and compliance checks—all governed by the protocol. Employers who need robot services pay in $ROBO, the native token, which handles settlements for completed tasks. This creates a marketplace where robots are effectively leased out on-demand, with fees flowing back to support the network. It's not about owning hardware individually; it's collective allocation, ensuring robots are utilized efficiently without massive upfront capital from any single entity.
Compare this to traditional robot leasing, like those offered by companies in the humanoid market, where annual costs can hit $100,000 per unit through bilateral contracts with manufacturers. Those models rely on private capital for upfront expenses and internal teams for operations, leading to higher barriers for entry and less flexibility. Fabric flips this by decentralizing funding and ops—stablecoin deposits democratize access, and blockchain verification ensures transparent task allocation. However, Fabric introduces tradeoffs in incentive structures: while traditional leasing guarantees dedicated support, Fabric depends on community participation, which could lead to variability in uptime. Another angle is comparing to DePIN projects like Render for compute; Fabric extends this to physical robots, blending digital incentives with real-world hardware, but it demands stronger off-chain partnerships.
Digging deeper, one unique insight is how Fabric's model could foster "emergent efficiency" in robot economics—by pooling resources, the ecosystem reduces idle time for robots, potentially lowering effective leasing costs below centralized benchmarks. But there's a hidden cost: coordination overhead. Decentralized ops mean relying on distributed contributors for maintenance, which might introduce delays or inconsistencies if participation wanes. On the benefit side, protocol revenue buying back $ROBO creates a flywheel for real yield, rewarding early contributors without promising direct ownership. The risk? If real-world adoption lags, those pools could underperform, highlighting the tension between blockchain ideals and physical logistics.
The space isn't without hurdles—scaling decentralized robot fleets requires maturing tech like verifiable compute for task validation, plus navigating regulations for autonomous machines. Partnerships for insurance and service contracts are crucial, as hardware failures can't be fixed by code alone. Long-term, transparency in Fabric's design matters because it builds trust in an industry prone to overpromising. By focusing on open governance rather than closed ecosystems, Fabric lays foundational groundwork for sustainable automation, positioning itself as a building block for future AI economies instead of a quick win.
To make this actionable, I've developed the "Fabric-Style Robot Leasing Framework"—a reusable model for evaluating decentralized robot economies. Here's the 3-point checklist: 1. Funding Accessibility: Does the system allow broad participation in capital allocation, like stablecoin pools, to lower entry barriers? 2. Operational Resilience: Are incentives aligned for consistent maintenance and uptime, with verifiable proofs to minimize downtime? 3. Yield Transparency: How are revenues distributed—through buybacks or direct rewards—and are tradeoffs like non-transferable participation clearly stated?
As we watch robotics intersect with Web3, what overlooked real-world constraint do you think could make or break decentralized robot leasing models like Fabric's?
@Fabric Foundation #Robo
