人们总以为给机器人装上大语言模型大脑,它们就能完美融入物理世界。
但现实是,当一台机械臂或无人机处理复杂指令时,这种黑盒式的执行过程令人不安。如果它捏碎了实验室烧杯,人类根本无从分辨这到底是硬件故障还是算法幻觉。
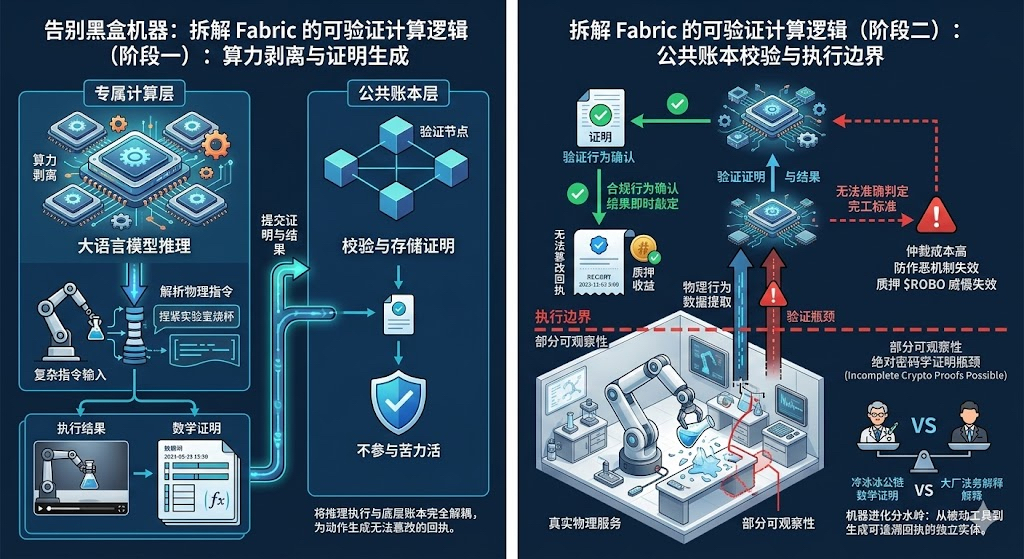
面对这种执行层面的不透明,@Fabric Foundation 给出的解法是彻底摒弃大包大揽的单体网络架构。
真正的机器协作基石并非无脑堆叠算力,而是将推理执行与底层账本完全解耦,为每一次 #ROBO 动作生成无法篡改的回执。
协议的核心是将整个网络拆解为独立且紧密协同的模块。
首先是剥离算力,机器智能在专属的计算层发挥作用,这里专门负责运行复杂的算法和解析物理动作指令。
其次是生成数学证明,计算层在得出执行结果的同时会同步打包证明,如同后厨出菜必须附带带有时间戳的操作日志。
最后是公共账本校验,最顶层的账本完全不参与耗费算力的苦力活,仅负责校验计算层提交的证明,确认行为合规后即时敲定结果。
然而,这套严密的机制在向物理世界延伸时面临着严苛的执行边界。
白皮书坦言现实物理服务往往具有部分可观察性,并非所有复杂的现实动作都能被完美提炼成绝对的密码学证明。
如果任务极度复杂导致系统无法准确判定完工标准,哪怕网络中质押了大量 $ROBO 作为罚没威慑,这套纯粹依靠经济博弈的防作恶机制依然可能失效。
若这种基于证明的验证通道能抗住真实物理环境的高频冲击,且可验证计算的成本能得到有效控制,极可能在年内看到首批依靠回执自负盈亏的机器集群规模化落地。
反之,若物理行为验证的界限迟迟无法清晰界定,或者挑战仲裁的摩擦成本过高,这种主权闭环将难以走出极客的实验室。
从被动工具到生成可追溯回执的独立实体,才是机器进化的分水岭。
当机器人搞砸任务时,你更愿意相信大厂法务的解释,还是公链上冷冰冰的数学证明?