Coordination systems usually start from a simple assumption: once a task is assigned, it will be completed.
Fabric seems to question that assumption.
In software environments that logic usually works. Code runs inside predictable systems where execution conditions rarely change once a process begins. When something fails, it is treated as an exception rather than a normal outcome.
Physical machines rarely operate in that kind of stability.
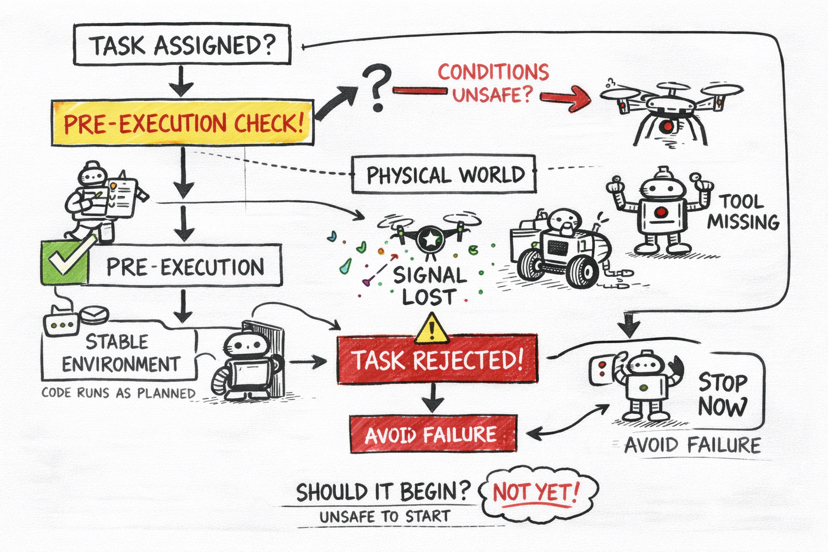
A delivery rover may reach a locked corridor.
An inspection drone may lose reliable signal inside a steel structure.
A maintenance robot may detect that a required tool module is unavailable.
Nothing is broken.
But the task should not continue.
Fabric’s coordination layer appears designed around that reality.
Instead of forcing execution, the network allows machines to reject tasks when required operating conditions are not met. Refusal becomes part of the system’s logic rather than a malfunction.
If a robot declines immediately because its battery is below the required threshold or the route becomes blocked, the network avoids partial work, inconsistent results, and unclear responsibility later. The refusal itself signals that the task should not have started.
That signal carries operational meaning.
Traditional automation systems usually discover instability only after execution fails. Task rejection moves that signal earlier.
The question shifts.
Not whether execution succeeded.
But whether it should have begun at all.
And in physical systems, that difference matters more than people expect.
@Fabric Foundation #ROBO $ROBO
