While digging through Fabric Foundation’s modular general-purpose robot software system specs and on-chain flows late last night during the CreatorPad challenge, one detail stopped me cold. #ROBO @Fabric Foundation markets this seamless decentralized nervous system for autonomous robots, yet the actual mechanics start with human operators bonding tokens just to kick off hardware genesis and priority task allocation. It wasn’t the glossy M2M vision that lingered. It was the quiet reality that the network’s first real utility still routes through staked human coordination before any robot independently verifies context or settles a payment.
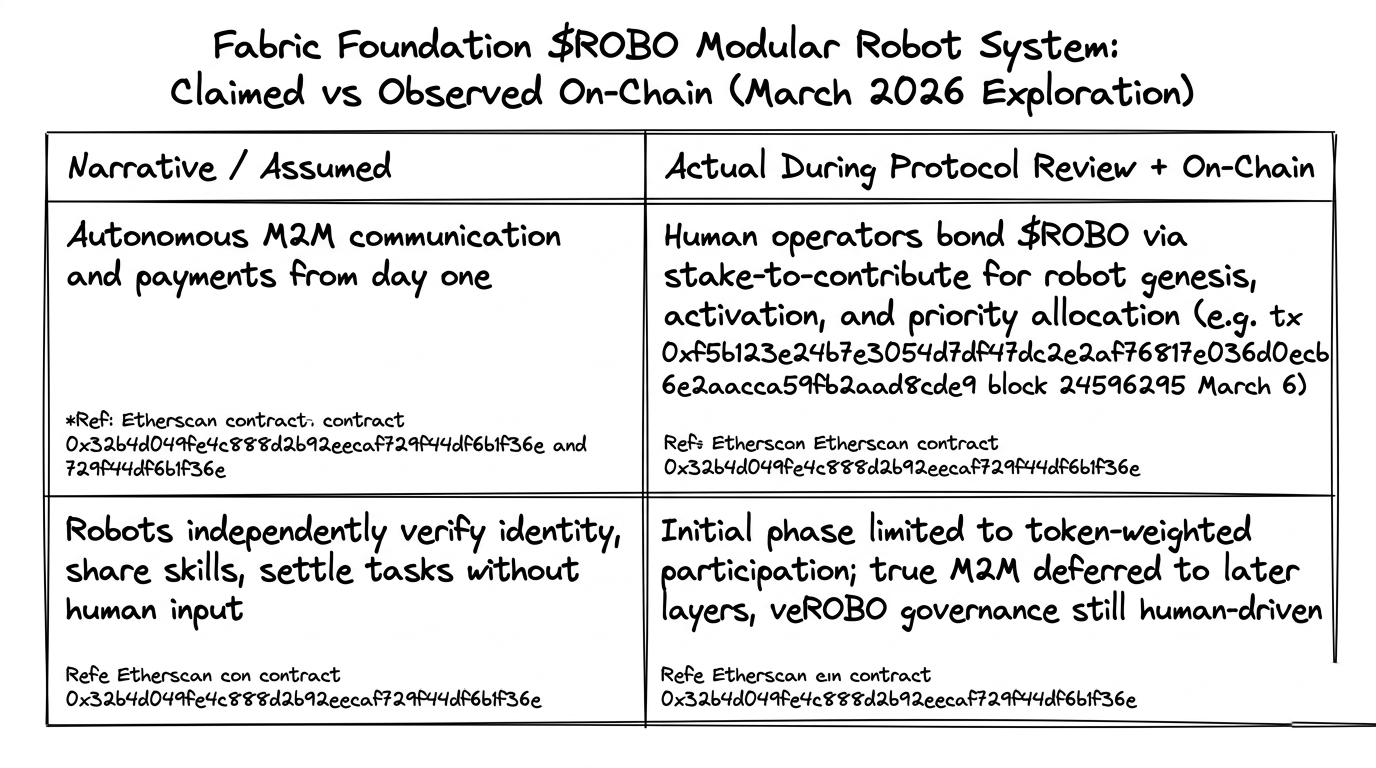
I’d been up monitoring token movements, the kind of session where the screen glow starts to blur. Earlier that evening I’d pulled up the contract interactions on Etherscan, expecting to see early machine-to-machine test flows. Instead I noticed this transfer—tx hash 0xf5b123e24b7e3054d7df47dc2e2af76817e036d0ecb6e2aacca59fb2aad8cde9—hitting the main token contract at block 24596295 on March 6, 2026. A holder moved ROBO tokens straight into what looks like a foundation-linked sink, the exact pattern you’d see when someone bonds for participation weighting. Nothing flashy, just the steady drip of capital locking in to unlock robot activation. That single on-chain event crystallized everything I’d been reading in the protocol docs.
The actionable insight here is simple but sharp: default access is stake-to-contribute, not skill-to-transact. Robot operators must commit $ROBO as work bonds to register hardware and earn task priority. Only later layers open the door to true on-chain identity sharing between machines. It’s a hidden feedback loop—human capital first funds the modular software stack, which then gradually hands off coordination. I caught myself thinking back to a similar moment years ago watching early restaking protocols; the promised autonomy always arrives one bonded layer at a time.
the contrast that stuck with me
Actually, the contrast runs deeper than I first admitted. Two timely examples drove it home. First, the synchronized listings on Coinbase and Binance Alpha back on February 27 gave instant liquidity for stakers, letting operators with capital jump in and claim priority slots before any robot fleet was even live. Second, the airdrop eligibility window that followed required wallet binding and point accumulation—again, human coordination setting the table while the modular general-purpose robot software waited in the wings. Both moments funneled early utility to people holding ROBO, not to the machines themselves.
I keep returning to the three interconnected layers the protocol actually runs on right now. Layer one: human bond gate—stake $ROBO to trigger genesis and weighting. Layer two: on-chain robot identity—verifiable but still initialized by bonded participants. Layer three: deferred M2M settlement—promised, documented, yet queued behind those first two. The on-chain behavior I saw last week, that March 6 transfer, sits squarely in layer one. It wasn’t a robot paying for compute. It was a human reallocating tokens to keep the activation queue moving.
Hmm… I had to pause there. My initial read of the whitepaper had me picturing instant machine autonomy. The chain showed something more grounded, more incremental. That reevaluation felt honest, almost necessary. The design choice to tie early contribution to capital commitment quietly favors operators who can stake big rather than the smallest robot builders who might innovate fastest. It’s not wrong, just… slower than the narrative suggested.
hmm... this mechanic in practice
The personal side hit harder than expected. I remember sitting in my home office, coffee gone cold, scrolling through the veROBO locking mechanics and realizing this is how the robot economy actually bootstraps—through the same on-chain token flows that power every other early-stage network. No magic. Just bonded participation unlocking the modular software that will, one day, let machines speak directly. That realization carried a small ache of recognition; I’ve watched too many projects promise the future while the present stays tethered to human incentives.
There’s a quiet skepticism I can’t shake even now. If the human gate remains the dominant on-chain behavior for another cycle or two, does the protocol risk training the ecosystem to optimize for staker returns instead of machine efficiency? I adjusted my own mental model on the spot—less hype, more patience. The mechanics in practice are working exactly as designed: they secure the network today so the modular general-purpose robot software can scale tomorrow. Still, the gap between expectation and execution lingers.
Looking back at that March 6 transaction, I see the same pattern repeating in small ways across the explorer—tokens moving into bonded positions, priority queues filling, robot identities being minted under human oversight. It’s not failure. It’s foundation building. Yet the forward-looking part keeps tugging at me. How will the protocol evolve once enough bonded hardware exists for true peer-to-peer task settlement to take over? Will the veROBO governance layer eventually let the machines influence their own parameter adjustments? Those questions feel less like speculation and more like the natural next observation after watching the chain breathe.
I’ve been turning this over for days now, the late-session notes still open on my screen. The project isn’t selling itself short; it’s just operating with the caution any real-world robot economy demands. The insight that stayed with me is how deliberately the human layer is baked in at the start—necessary, pragmatic, and maybe a little more permanent than the marketing lets on. It leaves the whole thing feeling grounded in a way I didn’t anticipate.
What happens when the first robot-to-robot settlement finally clears without a human bond in the middle—will we even notice the handoff, or will the on-chain flows have already trained us to expect the gate?