Я заметила, что когда люди говорят об автономных машинах, беседа обычно revolves вокруг интеллекта. Более быстрые модели, лучшие датчики, более умные алгоритмы. Эти элементы важны, но чем больше я наблюдаю за робототехническими системами, работающими в реальных условиях, тем больше я думаю, что большая проблема вовсе не в интеллекте. Это координация. Автономные машины могут выполнять задачи независимо, но в тот момент, когда они начинают взаимодействовать с другими системами, организациями и экономическими процессами, вопрос становится гораздо более сложным. Кто проверяет, что эти машины действительно сделали? Это вопрос, который заставил меня более внимательно взглянуть на Fabric Protocol.
Большинство роботизированных систем сегодня работают внутри централизованных структур. Компания разворачивает машины, запускает управляющее программное обеспечение, собирает оперативные данные и проверяет, были ли выполнены задачи. Во многих промышленных средах такая организация работает вполне хорошо. Когда одна организация контролирует как машины, так и инфраструктуру вокруг них, координация становится простой.
Но ситуация начинает меняться, когда автономные машины выходят за рамки экосистем с единым владельцем.
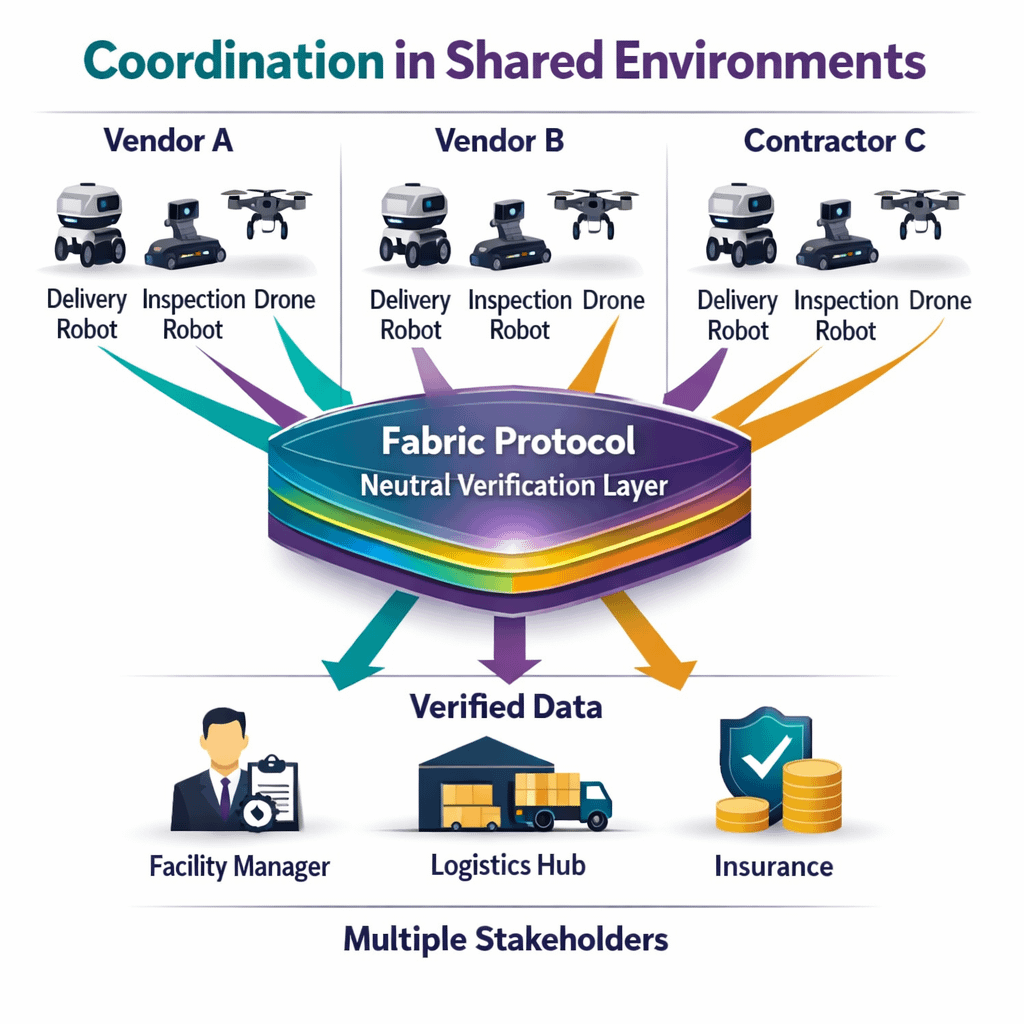
Я думаю о логистических сетях, где роботы доставки от разных поставщиков работают внутри одного и того же объекта. Или о системах мониторинга инфраструктуры, где дроны, инспекционные блоки и роботы обслуживания разворачиваются отдельными подрядчиками. В этих средах централизованная координация становится труднее поддерживать. Каждая организация может полагаться на свою собственную платформу, свои собственные журналы и свою собственную интерпретацию того, что на самом деле произошло.
Вот где подход Fabric Foundation начинает иметь смысл для меня.
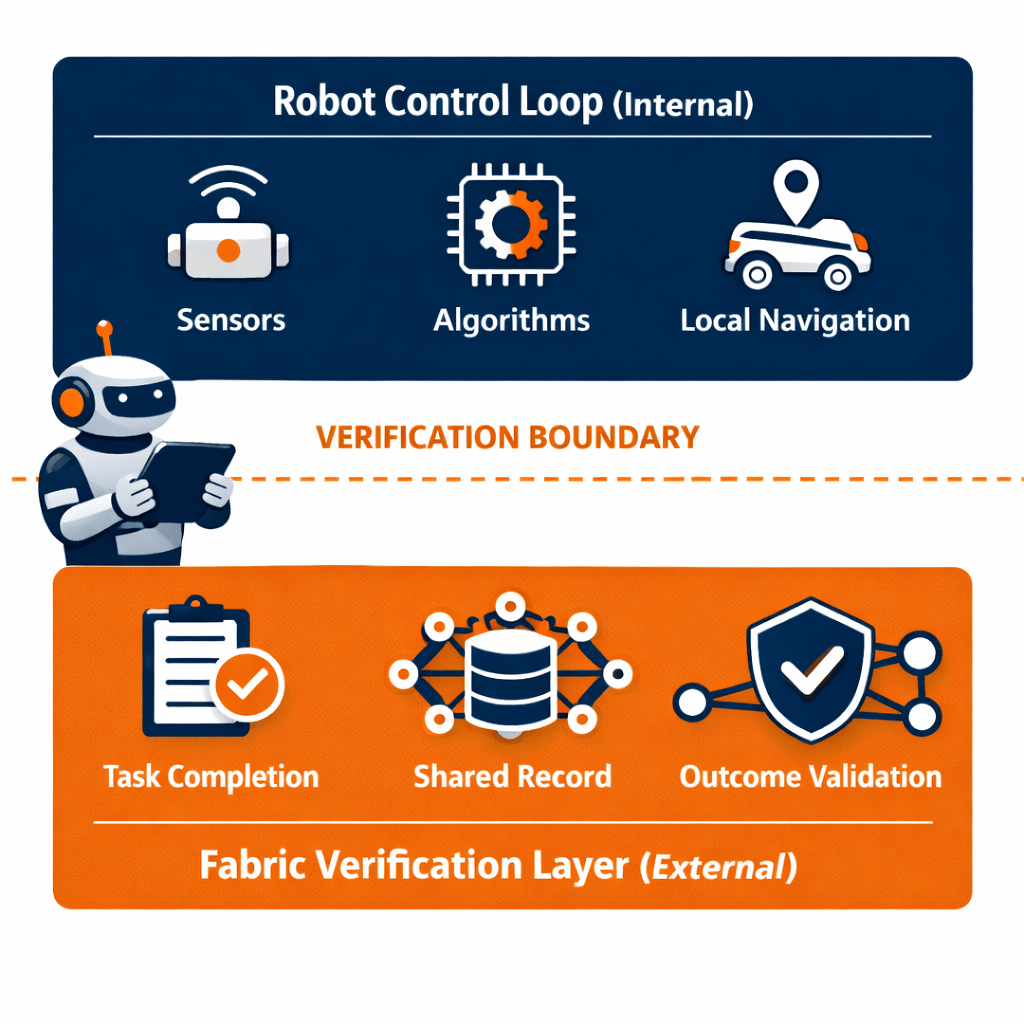
Вместо того чтобы пытаться контролировать сами роботы, Fabric сосредотачивается на верификации результатов роботизированной деятельности. Машины продолжают работать в своих собственных локальных системах, но их действия могут фиксироваться и проверяться через децентрализованный слой инфраструктуры. Цель, похоже, заключается в создании общего реестра роботизированной работы, на который могут полагаться несколько организаций без необходимости в едином центральном органе.
С моей точки зрения, эта идея переосмысливает то, что на самом деле означает управление автономными машинами.
Это не означает улучшение интеллекта внутри машины. Это означает улучшение систем, которые координируют и верифицируют работу машины. Другими словами, Fabric, похоже, меньше беспокоит о том, как думают роботы, и больше о том, как их действия становятся экономически и операционно значимыми.
Автономные системы уже работают в условиях значительных ограничений по производительности. Роботы должны быстро реагировать на входные данные с датчиков, ориентироваться в непредсказуемых средах и адаптироваться к изменяющимся условиям в реальном времени. Введение любого дополнительного слоя инфраструктуры, особенно одного, связанного с децентрализованной верификацией, естественным образом поднимает вопросы о задержках, сложности и операционных накладных расходах.
Централизованные системы часто добиваются успеха именно потому, что они упрощают координацию. Одна платформа фиксирует деятельность, проверяет результат и разрешает споры, если это необходимо. Децентрализованный слой верификации вводит дополнительных участников и процессы, которые все должны функционировать надежно.
Если этот процесс становится медленным или сложным, операторы могут предпочесть простоту централизованного контроля.
Что делает Fabric Foundation интересным для меня, так это то, что он, похоже, создан для того, чтобы избежать вмешательства в операции роботов в реальном времени. Вместо того чтобы вставлять себя в контрольный контур машины, он сосредотачивается на записи и верификации результатов после выполнения задач. Это разделение помогает поддерживать скорость и отзывчивость, которые требуются автономным машинам, при этом внедряя общий механизм верификации.
Другой фактор, о котором я продолжаю думать, это экономическое выравнивание.
Роботы не просто выполняют задачи. Они генерируют экономическую ценность. Автономная доставка, инспекция инфраструктуры и мониторинг окружающей среды все подразумевают участие нескольких заинтересованных сторон. Когда машины выполняют работу через организационные границы, естественно возникают вопросы компенсации, ответственности и верификации. Протокол Fabric, похоже, создан для решения этого слоя координации, а не для самой технологии робототехники.
Будет ли этот подход эффективным, вероятно, будет зависеть от его внедрения в настоящих операционных средах.
Инфраструктура робототехники развивается медленно, потому что надежность важнее новизны. Системы должны продемонстрировать, что они могут функционировать в непредсказуемых условиях, прежде чем организации будут готовы на них полагаться. Децентрализованный слой координации может звучать привлекательно концептуально, но ему все еще нужно доказать свою эффективность в средах, где машины, операторы и учреждения постоянно взаимодействуют.
На данный момент я вижу Fabric Foundation не как замену существующим роботизированным системам, а скорее как эксперимент в том, как автономные машины могут координировать действия в рамках децентрализованных сетей. Если роботы продолжат расширяться в совместные среды, где несколько заинтересованных сторон зависят от их активности, необходимость в нейтральных слоях верификации может стать труднее игнорировать.
Станет ли Fabric в конечном итоге одним из этих слоев, все еще открытый вопрос, но это тот тип инфраструктурной задачи, который, как правило, постепенно раскрывает свою важность, а не сразу.