我这次不从“宏大愿景”或“文明对齐”入手,而是站在2026年3月的当下,聊聊 @Fabric Foundation 的技术栈到底在解决什么具体痛点和我作为创作者的几点直观判断。
我先说说当下,2026年的具身智能已经不是实验室玩具了。Figure 03、Tesla Optimus Gen 3、Unitree G1 Pro 等硬件迭代飞快,端到端VLA模型在模拟和真实部署中成功率逼近80%以上。但问题也暴露得越来越明显:
黑箱决策不可审计,事故责任没法追;
技能碎片化、难以跨机器人迁移 ,每个厂商/模型重新训练,成本爆炸;
协作缺乏统一身份和结算,多机种、多运营商场景下,任务分配、支付、惩罚全靠中心化服务器;
价值捕获高度中心化,硬件+模型巨头吃掉绝大部分经济红利,生态参与者几乎没分成。
Fabric 不是在解决“机器人会不会取代人类”这种哲学问题,而是直接针对上面这些工程痛点,给出一套可落地的协议级解决方案。我觉得这才是它最值得多写的地方。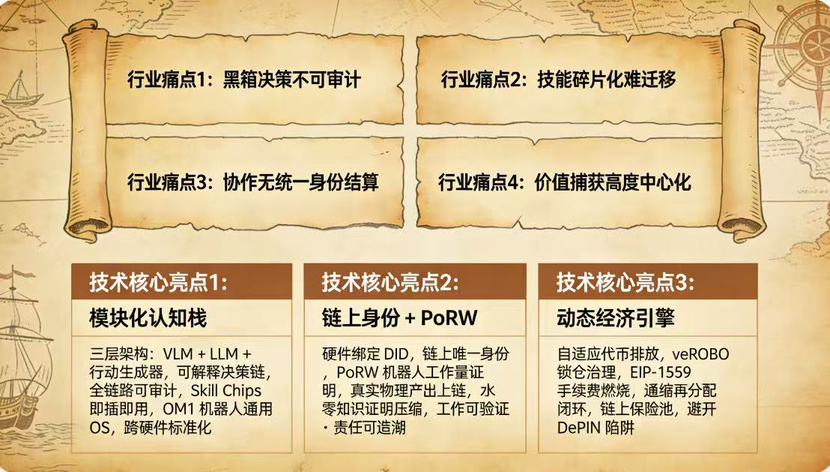
为什么模块化认知栈是当前最务实的取舍
主流趋势是端到端VLA:直接从像素/传感器输入映射到关节扭矩输出,性能确实高。但代价是解释性几乎为零,调试难、对齐难、监管难。Fabric 的 ROBO1 原型反其道而行:坚持经典三层模块化架构
VLM(视觉-语言基础):
处理多模态感知(RGB-D + 点云 + 力反馈),输出结构化场景理解;
LLM(高层规划):
接收VLM输出,做自然语言级任务分解、长期记忆调用、伦理守栏;
行动生成器(低层控制):
把高层指令转为可执行的轨迹/扭矩序列,支持经典控制器(如MPC、impedance control) fallback。
为什么不直接上端到端?
因为2026年的现实是:
安全-critical 场景监管机构已经开始要求“可解释决策链”。欧盟AI Act高风险类别、美国机器人安全草案,都在推“黑匣子+审计日志”要求。模块化让Fabric天然能满足:每层输出可单独记录、上链,形成完整的决策轨迹。万一出事,调查员能精确回溯到哪一层出了偏差,而不是面对一个不可拆的神经网络。
另外,模块化便于“skill chips”实现。技能不是端到端fine-tune整个模型,而是针对特定层做LoRA/Adapter微调(比如只调行动生成器的本地规范适配),然后打包成链上可验证的模块。下载即插即用,类似手机App store。这在技术上依赖标准化接口协议(类似ROS2的action/message定义,但上链注册+哈希验证)。当前ROS生态碎片严重,Fabric如果能推动OM1(机器人通用OS)+ Fabric协议的标准化,会极大降低跨厂商协作门槛。
链上身份 + PoRW 是对机器人“可信执行”的密码学回应
机器人身份问题在2026年已经很急迫了。
想象一个场景:
一家工厂同时跑ABB臂、Boston Dynamics腿、Figure躯干,云端大脑是混合模型,谁负责谁的任务?谁付电费/维护费?出故障谁赔?
Fabric 的解法是用密码学原生身份:
每台机器人生成硬件绑定密钥对(类似TPM芯片+链上DID),注册时上链铸造唯一NFT-like身份,绑定能力向量(支持的任务类型、精度、速度)、兴趣标签(偏好任务)、治理规则(所属DAO或多签)。身份不可伪造、不可转移,任务签名必须用这个密钥。
PoRW(Proof of Robotic Work)则是共识机制的机器人专用变体。不是矿机哈希竞赛,而是“真实物理产出证明”:
机器人完成任务,生成多模态证据包(传感器日志、视频片段、力/扭矩曲线);
随机监督者(其他机器人或人类验证节点)采样验证;
zk-SNARK/STARK 压缩证据,上链生成“工作单位”凭证;
PoRW 产出直接决定 $ROBO 排放份额。
这比简单 staking 强太多:
代币发行锚定真实GDP(机器人完成的物理工作量),而不是凭空印钞。相比中心化平台(任务全走私有API,数据不公开),PoRW 让工作历史成为公共账本,审计成本低、责任清晰。技术难点在于证据压缩和实时验证,zk开销目前还是瓶颈,但2026年的zk硬件加速(像Succinct、RISC Zero的进展)已经让它从“理论可能”变成“工程可行”。
经济引擎的动态自适应设计,避免了常见DePIN陷阱
很多DePIN项目经济模型简单粗暴:固定通胀 + staking奖励 ,早期农场主跑路,长期通缩崩盘。Fabric 用三层动态机制:
1. 自适应排放:排放率随网络PoRW总量浮动,高生产力期多发币吸引更多机器人加入,低生产力期收紧;
2. veROBO 锁仓治理:长期锁仓者有更高投票权,控制费率、政策、升级提案,避免短期投机操控;
3. EIP-1559式fee burn + 协议费分流:任务gas费部分burn,部分进国库/保险池/贡献者奖励,形成通缩+再分配闭环。
这套在技术上融合了ve(3,3)模型、动态曲线、链上保险,特别适合“生产力驱动”的场景。当前机器人部署规模还小,bootstrapping靠早期排放吸引硬件/技能贡献者;规模起来后,burn+保险池能维持价值锚定。
对当下环境的影响
给开源机器人生态续命:
巨头闭环太强,开源硬件/模型需要经济激励。Fabric 的技能共享 + PoRW 分红,能让中小开发者、独立硬件商活下去;
推动标准化:
OM1 + Fabric协议如果普及,会加速机器人“Android时刻”——硬件无关、应用可移植;
为监管提供技术方案:
链上黑匣子 + 可验证身份,帮政府解决“机器人责任谁担”的难题,间接加速合法部署;
挑战中心化价值捕获:
机器人创造的价值开始向网络参与者扩散,而不是只进少数公司腰包。
我的几点直观结论
1. Fabric 的技术路径务实且克制:没盲目追端到端性能,而是优先可解释、可审计、可经济激励,这在当前安全压力最大的阶段是最聪明的选择。
2. PoRW + 链上身份是最大亮点:如果跑通,它会成为具身智能的“身份+工作量证明”标准,类似比特币的PoW对数字货币的意义。
3. 风险主要在执行:zk实时性、早期规模、监管兼容。但路径清晰,2026年的zk生态进展已经让这些问题从“不可能”变成“难但可解”。
4. 作为创作者,我更愿意长期持有和写它,不是因为短期价格,而是因为它在技术上给了我“机器人不一定是巨头玩具”的信心。
Fabric 不是完美的,但它是目前最认真在从协议层解决具身智能信任与分配问题的项目。值得我们多观察、多测试、多贡献。#robo $ROBO