 Wprowadzenie
Wprowadzenie
Kiedy po raz pierwszy zetknąłem się z Fabric Protocol i systemem operacyjnym OM1, moje najważniejsze wrażenie było takie, że to system dotyczący płatności robotów. Wczesne artykuły głównie omawiały, jak roboty mogą mieć portfele cyfrowe, odbierać tokeny i otrzymywać wynagrodzenie za wykonywanie zadań. Brzmi to bardziej jak fintech w dziedzinie automatyzacji.
Jednak po głębszym zapoznaniu się z dokumentacją techniczną, samouczkami dla deweloperów oraz analizami inwestorów, stopniowo uświadomiłem sobie, że płatności to tylko zjawisko powierzchowne. Głębszym celem Fabric i OM1 jest stworzenie dla maszyn systemu wspólnej pamięci.
W tej architekturze roboty nie tylko przesyłają surowe dane z czujników lub proste instrukcje, lecz generują zorganizowane, czytelne raporty, opisujące, co zaobserwowały, jak osądziły i dlaczego podjęły określone działania. Fabric odpowiada za weryfikację tych raportów, przekształcając je w wiarygodne informacje, które mogą być odczytywane i wykorzystywane przez inne upoważnione roboty. Ta zmiana z „przesyłania danych” na „dzielenie się zweryfikowanym zrozumieniem” może na nowo zdefiniować sposób organizacji inteligencji maszynowej.
Od percepcji do zorganizowanego myślenia: jak OM1 organizuje inteligencję maszyn
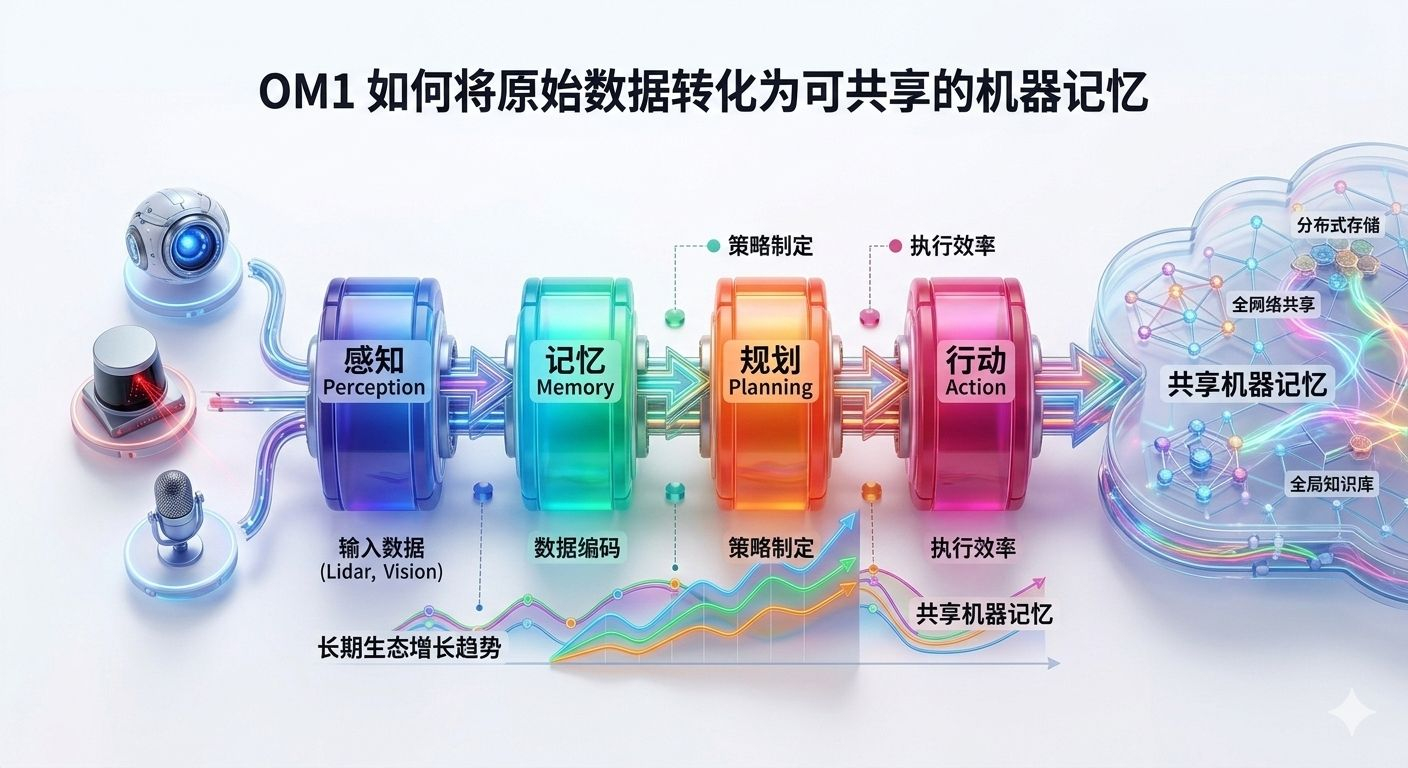
OM1 często określa się jako „uniwersalny mózg robota”, ale w praktyce bardziej przypomina ona ramy tłumaczeniowe dla robotycznej kognicji. Jej architektura modularizuje funkcje rdzeniowe, zwykle implementowane w Pythonie, w tym:
Percepcja
Pamięć
Planowanie
Działanie
Proces działania jest następujący:
Moduł percepcyjny odbiera dane z kamer, lidarów lub sieci;
Moduł pamięci przekształca dane w zorganizowane informacje;
Moduł planowania generuje strategie na wyższym poziomie;
Moduł działania wykonuje decyzje.
Wyjątkowość OM1 polega na tym, że stosuje ona podobny do języka szereg danych. Wewnętrzny stan systemu i decyzje nie istnieją w postaci trudnych do zrozumienia tablic wartości liczbowych, lecz są wyrażane w zorganizowanym tekście. Taki projekt ułatwia debugowanie, rozszerzanie systemu oraz dzielenie się informacjami z innymi robotami.
Deweloperzy mogą przeprowadzać testy za pomocą symulatora przeglądarki WebSim; OM1 może również integrować się z platformami symulacyjnymi, takimi jak Gazebo, aby weryfikować działania robotów w wirtualnym środowisku, a następnie wdrażać je w rzeczywistym świecie. Wirtualne roboty i rzeczywiste roboty używają tego samego wysokopoziomowego języka do opisu, co tworzy efekt podobny do „cyfrowego bliźniaka”.
Kluczowe znaczenie polega na tym, że roboty nie tylko wykonują działania, ale także potrafią wyjaśnić swoją logikę decyzyjną, co pozwala innym systemom zrozumieć i ocenić ich zachowanie.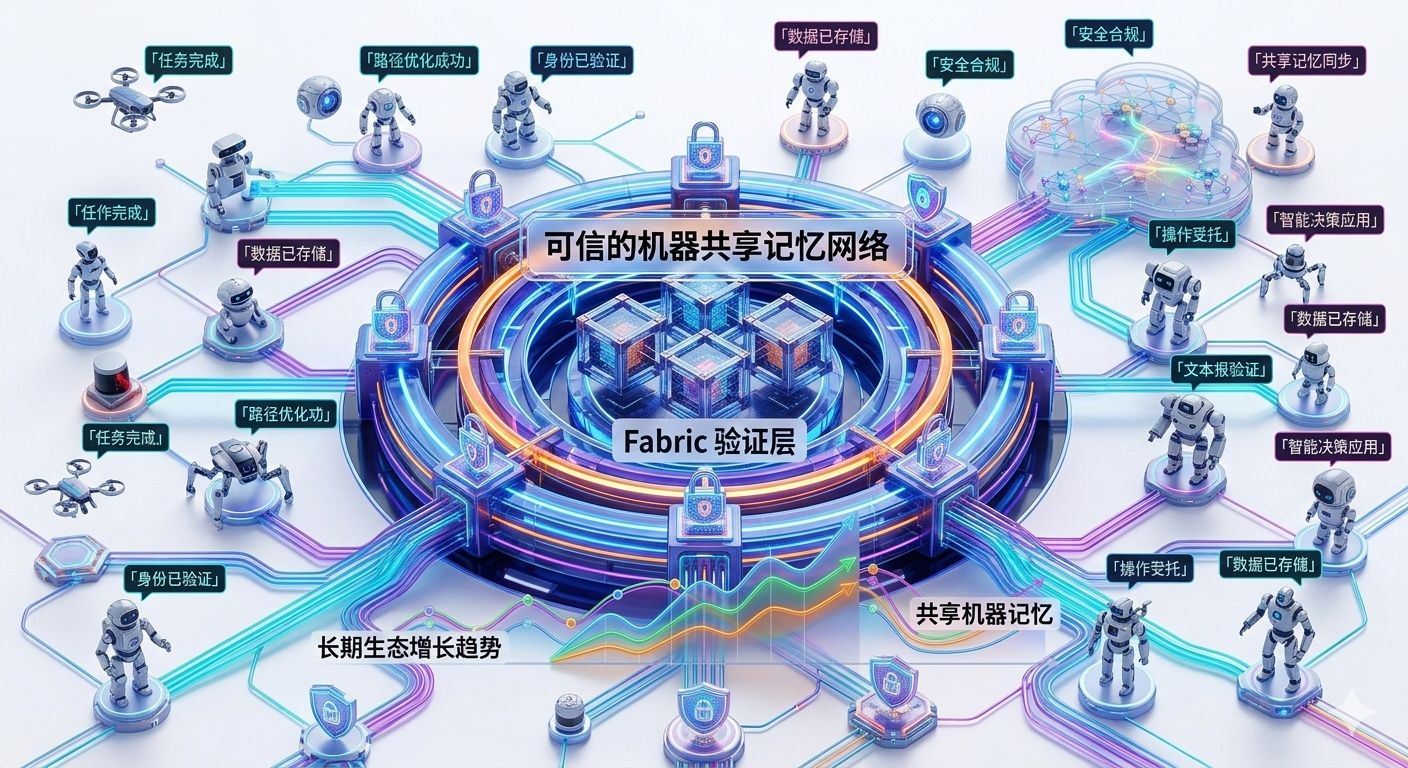
Warstwa weryfikacyjna Fabric: sprawia, że dzielona wiedza jest wiarygodna
Obecne systemy robotów zazwyczaj dzielą się jedynie podstawowymi danymi, takimi jak mapy czy sygnały kontrolne, ale zaufanie często polega na zdecentralizowanym zarządzaniu lub domyślnych założeniach.
Fabric wprowadza na to dodatkową warstwę mechanizmu weryfikacji. Roboty mogą weryfikować przed przyjęciem informacji od innych maszyn:
Tożsamość nadawcy
Miejsce zdarzenia
Dowód ukończenia zadania
Autentyczność podpisu elektronicznego
Fabric bardziej przypomina bezpieczną sieć społecznościową dla robotów. Gdy roboty kończą zadanie lub zdobywają nowe umiejętności, generują zorganizowane raporty, które zawierają dowody szyfrowania. Inne roboty mogą przeszukiwać księgę, aby potwierdzić źródło informacji i jej autentyczność.
Na przykład w magazynie jeden robot odkrywa bardziej efektywną trasę. W tradycyjnym modelu taka optymalizacja mogłaby istnieć tylko wewnątrz jednego systemu. Jednak dzięki Fabric ta trasa oraz jej dowód sukcesu mogą być publikowane w wspólnej księdze, co pozwala innym robotom na pobranie i wykorzystanie jej.
Ostatecznie powstaje coś, co przypomina ciągle rozwijającą się „robotyczną Wikipedię” — system zbiorowej pamięci, który rośnie z czasem.
Wiedza jako aktywa: możliwości rynku kapitału maszynowego
Jeśli wiedza generowana przez maszyny może być zweryfikowana i dzielona, może mieć wartość ekonomiczną.
Niektóre punkty widzenia inwestycyjnego sugerują, że Fabric może wspierać tworzenie rynku wiedzy. W tym modelu:
Roboty generują wartościową wiedzę (na przykład mapy o wysokiej precyzji lub zoptymalizowane strategie chwytania);
Ta wiedza jest standaryzowana i tokenizowana;
Inne roboty lub deweloperzy mogą ją kupować lub używać.
W przeciwieństwie do uniwersalnych tokenów ekosystemowych, tego typu tokeny wiedzy reprezentują specyficzne, zweryfikowane informacje. Ich wartość może zależeć od użyteczności, nowości lub rzadkości.
Oznacza to, że gospodarka robotów może przejść od dominacji sprzętu do koncentrowania się na aktywach wiedzy. Roboty, które stale dostarczają wysokiej jakości informacje, mogą mieć większą wartość ekonomiczną niż roboty wykonujące powtarzalne zadania.
Ale to rodzi nowe pytania:
Kto jest właścicielem danych generowanych przez roboty?
Jak obiektywnie ocenić jakość wiedzy?
Czy duże przedsiębiorstwa będą gromadzić wiedzę, aby stworzyć monopol?
Te problemy wykraczają poza tradycyjne ramy dyskusji dotyczących licencji open source.
Wyzwania i kompromisy związane z dzieleniem się pamięcią
Budowanie systemu wspólnej pamięci maszyn nie jest bez kosztów.
Po pierwsze, koszty obliczeń.
Duża liczba robotów stale publikujących i weryfikujących aktualizacje zwiększy obciążenie księgi, co może wpłynąć na efektywność współpracy w czasie rzeczywistym.
Po drugie, ryzyko prywatności.
Szczegółowe raporty z działań mogą ujawniać informacje o środowisku, a w przypadku braku filtrów i mechanizmów szyfrowania mogą rodzić problemy z monitorowaniem i zgodnością.
Po trzecie, fragmentacja standardów.
Wartość dzielenia się pamięcią zależy od efektu skali. Jeśli producenci przyjmują różne standardy, system może się podzielić na wiele niekompatybilnych „sieci pamięci”.
Ponadto dotyczą one również zużycia energii, regulacji politycznych i bezpieczeństwa sieci.
Sukces systemu zależy od równowagi między zaufaniem a zaangażowaniem: wysokie zaangażowanie, ale słaba weryfikacja prowadzi do zniekształcenia informacji; rygorystyczna weryfikacja, ale niskie zaangażowanie ogranicza wartość sieci.
Wnioski
Gdy zmieniamy perspektywę z „tokenów i płatności” na „przepływ wiedzy”, Fabric i OM1 ukazują zupełnie inne znaczenie. Prawdziwy przełom nie polega na tym, że roboty mogą być opłacane, lecz na tym, że roboty mogą w zrozumiały sposób rejestrować swoje obserwacje i decyzje, a następnie przechowywać je w wspólnej pamięci.
OM1 pozwala maszynom wyrażać proces myślenia; Fabric zapewnia, że te wyrażenia są wiarygodne. Połączenie obu tych elementów maluje obraz przyszłości — gospodarka robotów nie opiera się tylko na sprzęcie i transakcjach finansowych, lecz także na weryfikowalnej pamięci maszyn.
Ta wizja rodzi złożone pytania dotyczące własności, prywatności i regulacji, ale także otwiera wyższy poziom współpracy, adaptacyjności i przejrzystości.
Z tej perspektywy Fabric i OM1 nie są tylko infrastrukturą płatniczą, lecz próbą zbudowania „zbiorowej świadomości” dla maszyn.
\u003ct-51/\u003e\u003cm-52/\u003e\u003cc-53/\u003e
