
When I first started exploring the concept behind Fabric Protocol, I realized it is trying to address a challenge that has existed in robotics for a long time. Robots today are powerful machines, but most of them operate in isolated environments controlled by a single company or platform. Fabric Protocol introduces a different idea. Instead of robots working alone in closed systems, it proposes an open global network where robots, developers, and organizations can collaborate through a shared and verifiable infrastructure.
Fabric Protocol is supported by the Fabric Foundation, a non-profit initiative that aims to create a neutral ecosystem for robotics development. What attracted my attention is how the protocol combines robotics with blockchain technology and verifiable computing. The goal is not just to connect machines, but to make sure that every action, computation, and decision performed by a robotic system can be verified. Through a public ledger, robotic agents can prove what work they performed and how they followed certain rules. This type of transparency becomes extremely valuable when robots start interacting with real-world environments and human systems.
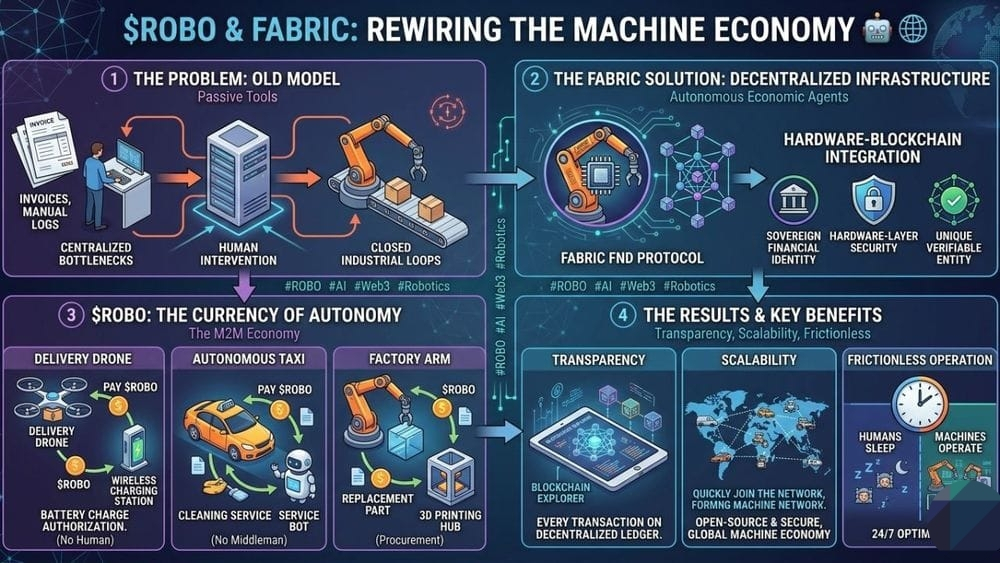
From my perspective, the integration of blockchain technology is one of the most important aspects of the protocol. In traditional robotics networks, centralized servers control updates, permissions, and coordination between machines. This approach often creates trust issues and technical limitations. Fabric Protocol replaces this centralized structure with a decentralized ledger that coordinates data, computation, and governance. When I think about it in simple terms, the blockchain becomes a coordination layer where robotic agents interact through transparent rules rather than depending on a single authority.
Web3 infrastructure plays a central role in this architecture. I see Web3 as the evolution of the internet toward decentralized ownership and programmable systems. Fabric Protocol fits naturally into this vision because robots can function as independent agents within the network. Through smart contracts, robotic systems can receive instructions, verify tasks, and participate in automated workflows. This creates an environment where machines can collaborate with each other and with humans without relying entirely on centralized control.
One area where I believe Fabric Protocol could have strong impact is in real-world use cases involving automation and robotics. In logistics, for example, warehouses are increasingly using robotic systems to manage inventory and delivery operations. However, these robots often belong to different companies and operate within separate systems. A decentralized coordination layer could allow them to communicate and collaborate securely. I can imagine a future where robots from different organizations share operational data, coordinate tasks, and execute deliveries through a trusted decentralized infrastructure.
Manufacturing is another space where this concept becomes relevant. Industrial robots are already responsible for a large portion of production processes around the world. Yet integration between different robotic systems is still complicated. Fabric Protocol could create a shared trust layer where robotic operations are verifiable, traceable, and interoperable. This would make collaboration between factories, suppliers, and automation providers much more efficient.
Another element that I find interesting is tokenization within robotic ecosystems. Tokenization allows digital assets to represent real-world resources on a blockchain. In the context of Fabric Protocol, robotic services and computational resources could be tokenized. I see this as a way to create decentralized markets where robotic capacity becomes a programmable asset. For example, a robot capable of performing delivery tasks could tokenize its operational availability, allowing companies to reserve or purchase robotic services through a decentralized marketplace.
This idea also connects to the broader concept of real-world assets in blockchain ecosystems. Robots are physical machines that perform measurable work in the real world. By linking blockchain records to robotic performance data, Fabric Protocol could allow robotic infrastructure to be represented digitally while maintaining verifiable connections to physical activity. In my view, this creates an entirely new economic layer where automation resources become transparent and tradable within decentralized networks.
Privacy is another important factor when dealing with robotics and real-world data. Robots constantly collect sensor information, operational logs, and environmental data. Exposing all of that information publicly would not always be practical or secure. Fabric Protocol approaches this issue through verifiable computing and controlled disclosure. Instead of revealing raw data, the system can generate cryptographic proofs that confirm specific events or actions occurred. I believe this approach allows organizations to collaborate without compromising sensitive information.
The technical architecture of Fabric Protocol also appears to follow a layered blockchain model. The base layer functions as the trust anchor where identities, proofs, and governance rules are recorded. However, robotic networks generate huge volumes of data and computational activity. To handle this scale, execution environments can operate in modular or layer-2 structures where computations occur off-chain before final verification is recorded on the base layer. From my perspective, this layered design is essential for making decentralized robotics infrastructure scalable.
Governance also plays a major role in the long-term sustainability of the network. Since the ecosystem is supported by a non-profit foundation, the vision seems to focus on collaborative development rather than corporate control. I see decentralized governance as an important component because it allows developers, operators, and stakeholders to participate in shaping the protocol’s evolution. Through governance mechanisms, participants can propose upgrades, define safety frameworks, and guide economic incentives within the ecosystem.
What fascinates me most about Fabric Protocol is how it connects several technological trends that are rapidly evolving. Robotics, artificial intelligence, blockchain infrastructure, and decentralized coordination are all advancing quickly, but they often develop in separate ecosystems. Fabric Protocol attempts to combine these elements into a single framework where robots become verifiable agents within a decentralized network.
When I think about the future potential of this model, the idea of an “Internet of Robots” becomes more realistic. Just as the internet transformed isolated computers into a global information network, Fabric Protocol aims to connect robotic systems into a global infrastructure of shared intelligence and collaboration. In such a system, robots would not only perform tasks but also interact with decentralized applications, share knowledge, and contribute to a continuously evolving ecosystem.
In the end, I believe the success of Fabric Protocol will depend on real-world adoption. Technology alone cannot build a network; developers, organizations, and operators must actively participate in it. If robotic systems begin integrating with decentralized infrastructure and if developers continue building applications around this concept, the protocol could become an important foundation for future automation networks.

@Fabric Foundation #robo $ROBO
