Most discussions about robotics revolve around smarter machines. We hear about better sensors, stronger hardware, and more advanced artificial intelligence models. Yet a quieter challenge sits behind all of this progress. As robots slowly move from laboratories into real-world environments, the real difficulty may not be intelligence or hardware at all. The deeper issue may be coordination.
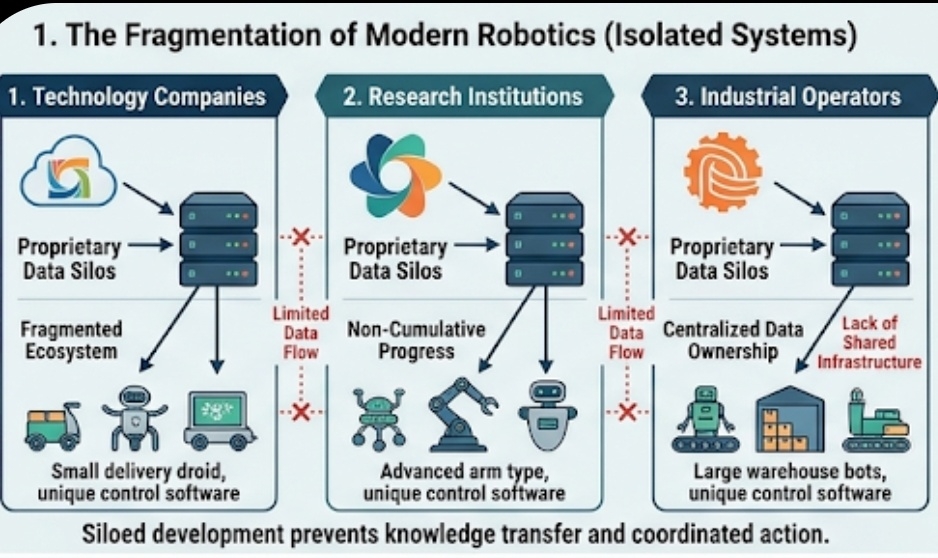
Robotics today operates within a surprisingly fragmented ecosystem. Technology companies build their own platforms, research institutions develop independent algorithms, and regulators attempt to oversee systems that often operate across multiple jurisdictions. Each group contributes important pieces, but there is rarely a shared infrastructure connecting them.
This fragmentation creates practical limitations. A robot trained in one environment may not easily transfer knowledge to another. Operational data collected by companies is often stored privately, preventing other developers from learning from those experiences. As a result, progress in robotics can become isolated rather than cumulative.
For many organizations, the default solution has been centralized management systems. These platforms control robot fleets, store operational data, and manage updates from a single authority. Centralization can make deployment easier, but it also concentrates control and reduces transparency for external participants.
Academic collaboration has offered another pathway. Robotics researchers frequently share datasets, publish models, and release experimental tools. These contributions support innovation, but they rarely form long-term coordination structures capable of supporting large-scale industrial deployment.
The issue becomes more serious when robots operate in public or unpredictable environments. Autonomous systems interacting with humans raise questions about accountability. If a robot makes a decision that leads to harm or failure, verifying how that decision occurred becomes a critical requirement.
Without reliable verification mechanisms, trust becomes difficult to establish. Regulators may hesitate to approve widespread deployment, organizations may hesitate to share operational data, and users may remain uncertain about how autonomous systems are monitored or controlled.
In response to these structural problems, some developers are exploring decentralized infrastructure as a coordination layer for robotics. Instead of relying on a single platform owner, distributed networks attempt to create shared systems where multiple participants can verify information and collaborate under common rules.
Fabric Protocol emerges from this broader line of thinking. Rather than building robots directly, the project focuses on the infrastructure that supports how robots are developed, governed, and coordinated across organizations.
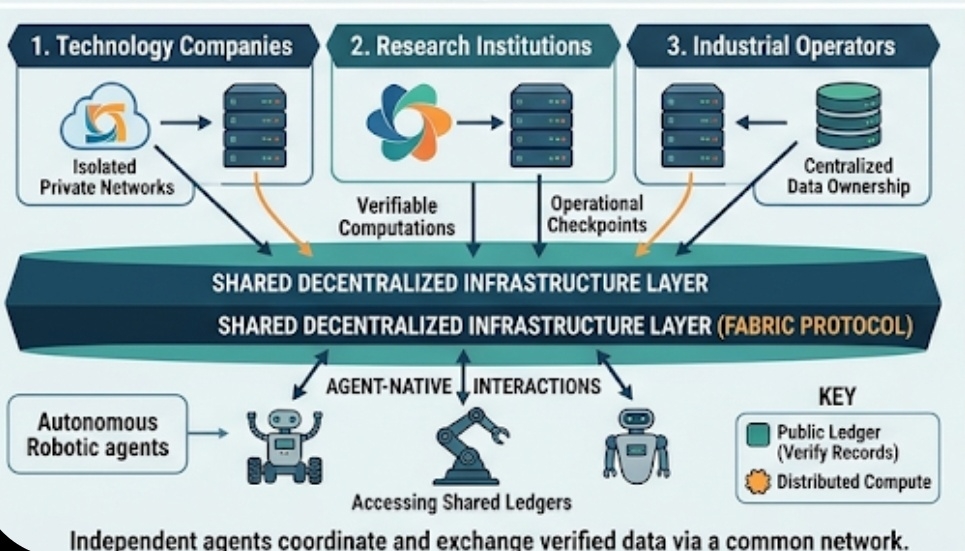
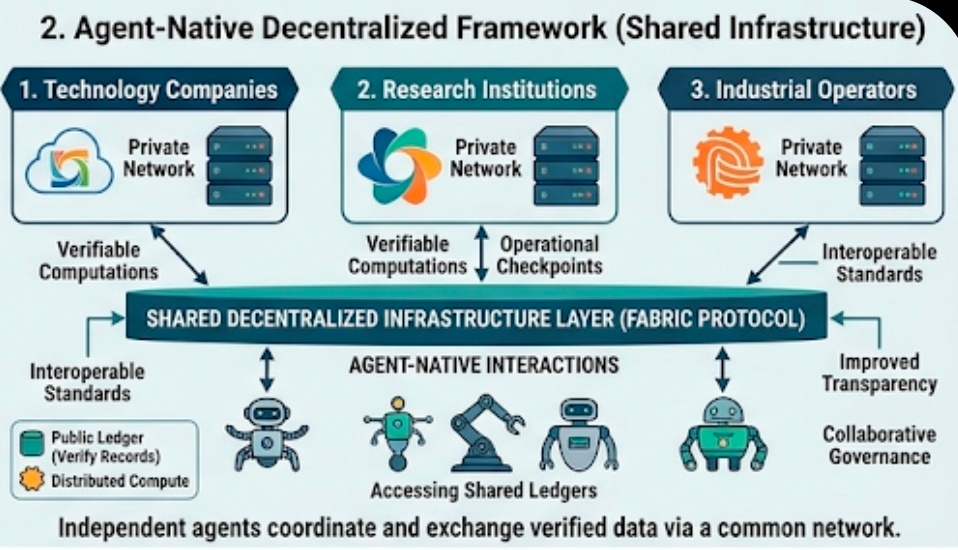
The protocol proposes an open global network supported by the Fabric Foundation. Its goal is to create an environment where robotics development can be coordinated through verifiable computing systems and a public ledger that records key interactions within the network.
In practice, this means that certain activities—such as computational processes, data exchanges, or operational checkpoints—can be recorded in ways that allow independent verification. The intention is not to store every detail of robotic operation, but to create a trusted layer where critical actions can be confirmed.
Fabric’s architecture is designed to be modular. Different components such as data providers, compute services, and robotic agents can connect to the network through standardized interfaces. This approach attempts to reduce the integration challenges that often prevent different robotics systems from working together.
Another concept introduced by the protocol is agent-native infrastructure. In this framework, robots and software agents are not treated only as tools controlled by human operators. Instead, they can interact directly with network services, requesting computation, accessing verified datasets, or coordinating tasks within the system.
Verifiable computation also plays an important role in the design. This method allows participants to prove that a computational process occurred correctly without exposing all underlying data. For organizations handling sensitive information, this could offer a balance between transparency and confidentiality.
Despite these ideas, several challenges remain. Robotics systems generate enormous amounts of sensor data in real time. Recording everything on a public ledger would be impractical, meaning developers must carefully determine which information truly requires verification.
Privacy is another major concern. Robots operating in workplaces, cities, or homes may capture sensitive environmental data. Ensuring that transparency mechanisms do not expose private information will require careful technical safeguards and governance rules.
Participation may also become uneven. Large robotics companies with significant engineering resources could integrate with decentralized protocols more easily than smaller research teams or startups. If technical barriers remain high, an open network could still end up serving a relatively limited group of participants.
Governance presents another unresolved question. Even decentralized systems require rules for updating software, resolving disputes, and maintaining security. These processes often involve social and institutional decisions that extend beyond technical infrastructure.
Still, the emergence of projects like Fabric highlights a shift in how robotics challenges are being framed. The conversation is slowly moving away from individual machines toward the broader systems that coordinate information, responsibility, and collaboration.
As robots become more common in industries such as logistics, healthcare, and manufacturing, the infrastructure that governs their behavior may become just as important as the machines themselves.
The open question is whether the robotics community is prepared to rely on shared, verifiable networks for coordination, or whether most development will continue inside isolated platforms controlled by individual organizations. Mm