@Fabric Foundation When I first looked at the idea of ROBO Coin connecting robotics and Web3, my instinct was skepticism. Crypto has a long history of attaching tokens to emerging industries before those industries actually need them. AI tokens, gaming tokens, social tokens. The pattern repeats often enough that it becomes difficult to separate infrastructure from narrative.
What struck me, though, was that robotics may eventually run into a structural problem that blockchains were originally built to address. Not speculation. Coordination. My working view is that if ROBO Coin matters at all, it will not be because robots need a currency. It will be because distributed machines eventually need a shared system for agreeing on what actually happened.
That sounds abstract, but the misconception around robotics and Web3 usually starts in the wrong place. People imagine robots earning tokens for completing tasks. A warehouse robot moves a crate, a token moves in response. Surface level, that is the story most people understand.
Underneath, the real problem is not compensation. It is verification. When machines operate across multiple organizations, someone has to confirm that an action occurred before anything else can happen.
Surface level, a blockchain record simply logs activity. A robot completes a task, a transaction records it, and the network processes the update.
Underneath, the ledger functions more like shared memory. Every participant reads from the same historical record. They do not need to trust each other because they rely on the consistency of the record itself.
That enables coordination between actors that otherwise operate independently. A logistics provider, a warehouse operator, and an autonomous delivery service could all rely on the same underlying record of events rather than maintaining separate databases that constantly drift out of sync.
Still, coordination problems rarely disappear on their own.
Understanding that tension becomes easier if you step back and look at robotics as a system rather than a product. The International Federation of Robotics estimates that more than 3.9 million industrial robots are currently operating in factories worldwide. That number matters because it reveals how large robotic infrastructure already is.
Yet almost all of those machines operate inside closed systems controlled by a single company. They work efficiently because coordination happens internally.
The challenge appears when machines begin interacting across organizational boundaries. A delivery drone connecting to a warehouse robot. A maintenance robot interacting with equipment owned by another firm.
Surface level, those machines just exchange data.
Underneath, they require a neutral system that confirms what each machine actually did. Without that confirmation layer, coordination becomes fragile. One missed update in a logistics system can disrupt inventory forecasts or delivery schedules.
That is where a shared ledger begins to look less like a financial tool and more like infrastructure.
Meanwhile the broader crypto market has been quietly shifting toward infrastructure narratives. The number matters not because of its size alone, but because of what it signals about investor behavior.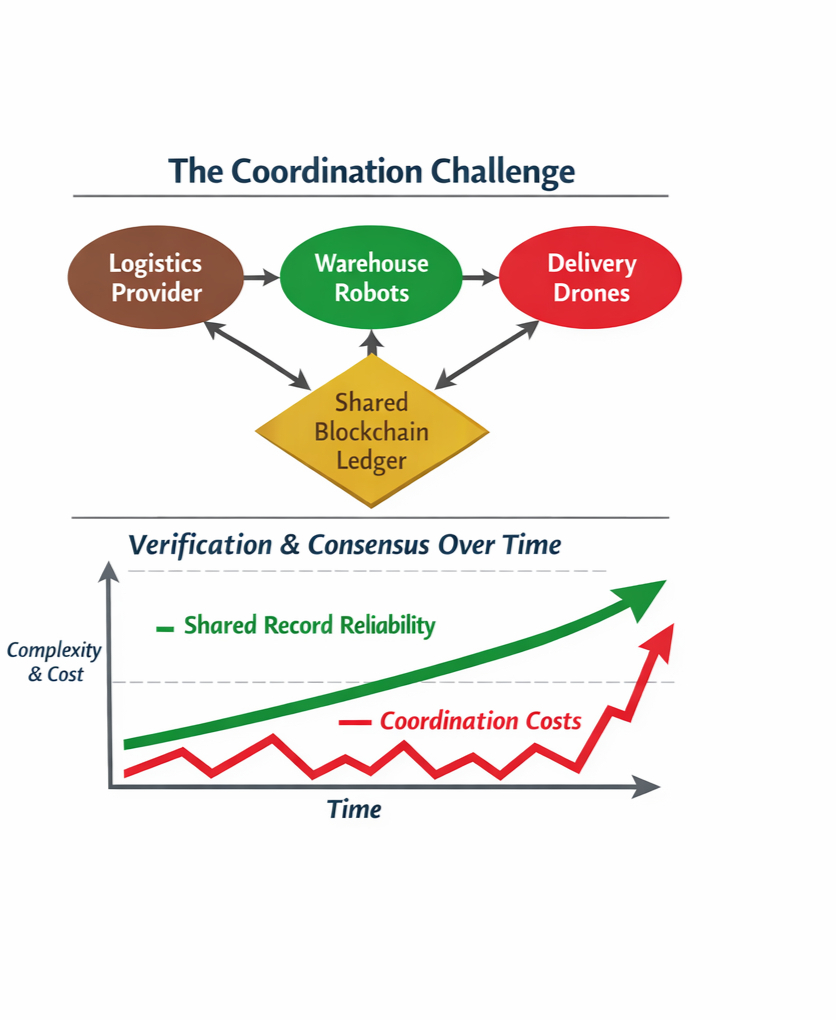
When automation narratives meet infrastructure capital, coordination systems become a natural point of interest.
Surface level, ROBO Coin might look like a typical crypto asset tied to a technology trend.
Underneath, it could represent a mechanism that enforces shared participation rules across robotic networks. Tokens in decentralized systems often function as alignment tools. They reward participants who maintain the shared record.
That enables independent machines or operators to rely on the same coordination layer without giving control to a single central authority.
The idea becomes clearer when looking at existing blockchain infrastructure. Ethereum processes roughly one million transactions per day on average. That number is not extraordinary compared to traditional payment networks.
But the number reveals something else. Thousands of independent actors can rely on the same ledger without trusting each other directly.
The economic activity built on top of that shared record now exceeds tens of billions of dollars in decentralized finance liquidity. What those systems prove is that coordination infrastructure can support complex economic behavior when participants trust the record.
Robotics networks could eventually require something similar.
That possibility introduces a shift in perspective. Instead of asking whether robots should have tokens, the better question becomes whether autonomous machines need shared infrastructure for verifying actions across networks.
If robots remain confined to isolated factories, the answer may be no.
But automation is slowly expanding beyond controlled environments. Autonomous vehicles, drone logistics, and robotic inspection systems are beginning to operate in shared physical spaces.
Those environments create overlapping responsibilities between machines owned by different entities. Without consistent records, disputes over events become inevitable.
Surface level, the blockchain simply records the task.
Underneath, the system establishes a neutral historical reference that participants can audit later.
That enables coordination without requiring centralized oversight.
The risk is that physical systems introduce complications digital systems do not face. Sensors fail. Connectivity drops. Data integrity becomes dependent on hardware reliability.
Governance introduces another layer of uncertainty. Distributed networks require collective decision-making when rules change. That process can slow down adaptation when real-world robotics environments evolve quickly.
These constraints explain why most robotics systems still rely on centralized coordination.
Yet markets rarely ignore structural problems for long. As robotic networks scale, coordination costs tend to rise faster than machine capabilities.
That is partly why verification systems are becoming a topic of discussion across AI and robotics research communities. Machine identity frameworks, verifiable computing layers, and shared operational records are beginning to appear in technical roadmaps.
Those components look strikingly similar to infrastructure patterns already present in Web3.
Meanwhile crypto liquidity cycles continue to search for credible long-term narratives. AI infrastructure, decentralized compute, and machine verification systems have all attracted capital flows during the past two years.
That momentum creates another effect. Markets start exploring the intersections between these themes.
Robotics represents physical automation. Web3 represents decentralized coordination. ROBO Coin attempts to occupy the narrow space where those two systems might overlap.
Whether that structure holds remains uncertain.
Real-world robotics networks will test any coordination system under physical constraints that blockchains rarely face. Hardware failures, safety regulations, and unpredictable environments all introduce friction.
Early signs suggest interest in machine coordination infrastructure is growing, but it remains to be seen whether decentralized ledgers are the right architecture for it.
Still, the deeper question may not be whether robots need tokens at all.
It may be whether large networks of autonomous machines can function without a shared memory of events that everyone agrees on.
And if robotics eventually collides with Web3, the connection will probably not come from speculation or payments.
It will come from the quiet need for machines to operate from the same record of reality.#ROBO #robo $ROBO