The arm stopped at 14:23:07. I saw it halt, the hydraulic hiss bleeding off into the concrete room. But the dashboard still showed EXECUTING. Green bar pulsing. My finger hovered over the kill switch, tendon tight, waiting for the mismatch to resolve.
It didn't.
I thought the delay was latency. Network lag between the Unitree joint and the Fabric node. I imagined packets clogging some router, concrete dust interfering with the mesh. Then I blamed the sensor fusion. The LIDAR point cloud disagreeing with the tactile feedback, creating a hesitation in the logic.
Wrong again.
The robot wasn't unsure. The robot was done. It was the proof that hadn't finished compiling.
"Complete" was the word I almost used. Deleted it. The task wasn't complete. It was executed. There's a difference that costs money.
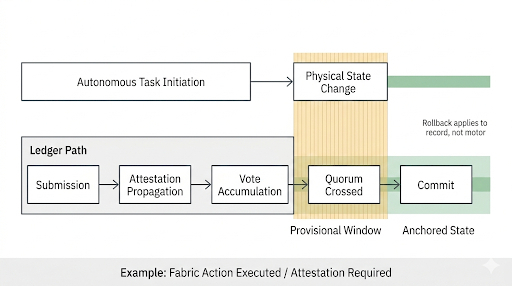
The telemetry arrived first. Raw accelerometer screams, motor current signatures, temperature curves from the gripper servos. Unverified noise. Anyone could spoof that, inject false velocity claims, pretend to fold laundry they never touched. So Fabric doesn't trust the telemetry. It trusts the robot execution attestation.
The TEE wakes up on the robot's local board. The trusted execution environment, secure enclave, black box. The TEE gathers the runtime traces, hashes the sensor feeds, generates the cryptographic proof of robot work. It takes the physical motion and distills it into a string that validators three thousand miles away can verify without believing.
My eyes burned watching the status flicker. EXECUTING to VERIFYING.
The gap lasted eight seconds. Eight seconds where the arm hung motionless but the ledger hadn't agreed to accept the motion as real.
The machine verification network doesn't care about the towel. It cares about the consistency of the proof. The distributed validators check the robot execution attestation against the machine runtime verification hash, looking for drift, for tampering, for the thermal bit-flip that turns a fold into a fictional event. They don't watch video. They don't trust cameras. They verify the cryptographic trail.
I used to think this was about preventing cheating. Keeping bad robots from claiming work they didn't do. But watching the attestation crawl across the robot proof network, I realized it's about preventing disagreement. The autonomous coordination only works if every machine agrees on what happened. Not what probably happened. What deterministically, verifiably occurred.
The proof enters the robot execution ledger. Block 1847. The robot can finally release the towel.
Eight seconds of physical stasis while the digital caught up.
My shoulders dropped when the status turned CONFIRMED. I hadn't realized they were hunched. The body reacting to the system's hesitation.
It's not labor anymore. It's evidence.
"Evidence" feels too criminal, or whatever. It's documentation that resists denial. On Fabric, The work becomes undeniable only after the proof seals it. The physical action exists in a superposition until the validators reach consensus.
The network verifies. The robot waits. The towel stays folded in the gripper, held by the friction of pending confirmation, until the machine verification network agrees that yes, the motion happened, the task is real, the work exists.
Eight seconds.
That's the new latency class. Not network lag. Not thermal throttling. The time it takes to prove the physical actually occurred.
The system doesn't error when the proof delays. It simply... extends. The execution stretches into verification. Fabric's autonomous action verification protocol demands the robot hold position, maintain grip, stay locked in the final posture until the distributed task verification completes.
I watched the gripper servos whine, fighting gravity, waiting for the cryptographic release command. The machine runtime verification checking every microsecond of the action against the attestation hash.
But then I noticed something else.
Block 1847 arrived. Then 19. The status stayed CONFIRMED for the towel task, but the robot telemetry verification feed showed the arm had drifted 0.3 millimeters from its original coordinates. Thermal expansion, maybe. Or the weight of the proof itself pulling downward.
The verifiable robot operations record said COMPLETE. The physical sensor said... migrating.
And I realized the gap doesn't close. It just moves. Fabric's machine task verification confirms what happened eight seconds ago, but the robot is already somewhere else, bearing the weight of confirmation, the attestation lagging behind the metal.
The ledger believes the robot is at coordinates X. The robot is already at X+0.3.
The gap stays open.
I kept staring at the dashboard, wondering how many tasks were hanging in that drift right now, across the Fabric network, robots frozen in cryptographic pose while their bodies slowly, thermally, inevitably escaped into the unverified present.