
Earlier today I was reading about something interesting the idea that mastering a skill can take around 10,000 hours of practice. It applies to almost everything. Doctors, electricians, chefs, pilots… even traders. Real expertise usually comes after years of learning and experience.
Humans improve slowly. That’s just how our brains work.
But while scrolling through some CreatorPad discussions later, I came across something connected to Fabric Protocol and ROBO1 that made me think about that idea differently.
Because machines don’t necessarily learn the same way we do.
If a robot learns a new capability, that knowledge doesn’t have to stay inside one machine. In theory, it could be shared across many robots almost instantly. That’s one of the concepts Fabric Protocol seems to be exploring.
From what I understand, Fabric isn’t simply trying to build a robot. It’s trying to build an open network that coordinates robot intelligence. Instead of a single company controlling development, different participants can contribute to the ecosystem.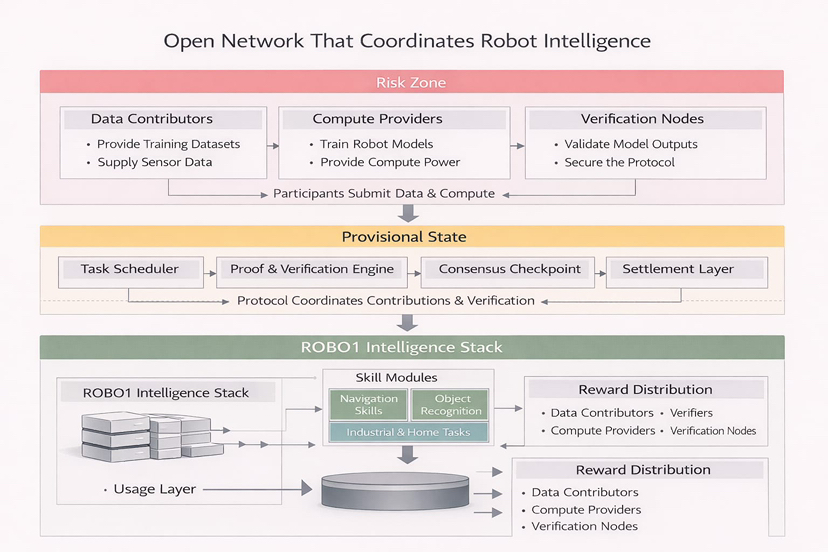
Some contributors provide training data.
Others supply computation to train models.
And some help verify results or secure the network.
All of these contributions are coordinated through public ledgers so they can be recorded and rewarded.
The improvements from that process eventually feed into ROBO1, the general-purpose robot the network is developing. But ROBO1 isn’t designed like traditional robotics systems. Its intelligence is structured in smaller modules that each handle specific tasks.
Fabric calls these modules “skill chips.”
You can think of them a bit like apps, but instead of running on a phone, they give a robot new abilities. One chip might allow navigation through complex environments. Another might handle object recognition. Others could support industrial work or home assistance.
As more contributors build and train these modules, ROBO1 gradually becomes more capable.
What makes this interesting is how quickly machine knowledge can spread. Humans often spend years mastering a skill before teaching others. But a robot skill that’s trained once could theoretically be distributed across many machines almost immediately.
That idea could have implications for industries where skilled workers are limited from healthcare to technical trades.
From a crypto perspective, Fabric’s structure also feels familiar. We’ve already seen decentralized compute networks where people share GPU power, and DePIN systems where users contribute physical infrastructure. Fabric seems to apply a similar coordination model, but instead of storage or compute, the network coordinates robot capabilities and intelligence.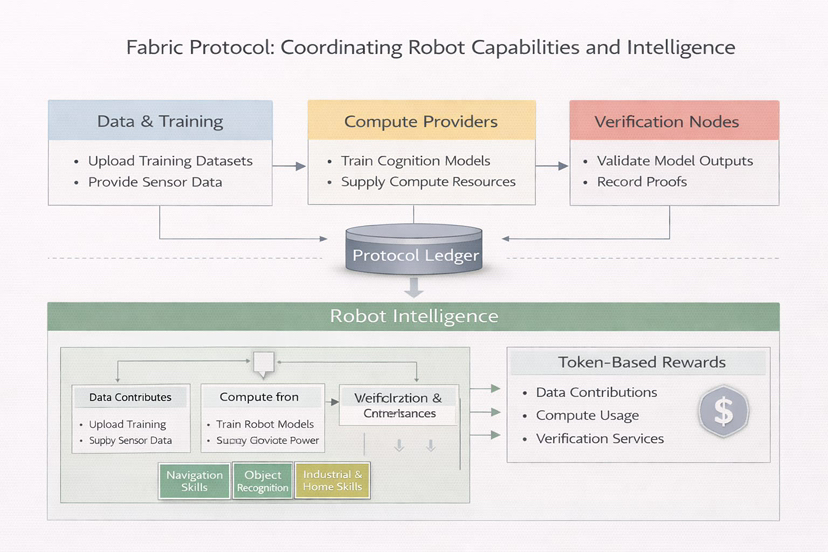
One detail that stood out to me is how the protocol tracks contributions. Because data, computation, and verification are coordinated through the network, contributors who improve the system can actually earn ownership or rewards.
That creates an interesting economic loop.
People contribute skills or infrastructure.
The robot gains new capabilities.
Users pay to access those capabilities.
And rewards flow back to the contributors.
Of course, robotics introduces challenges that software alone doesn’t have. Real-world environments are unpredictable, sensors can fail, and training data from physical spaces can be messy. So building an open robotics ecosystem will probably be more complex than it looks on paper.
Still, the idea behind Fabric keeps sticking in my mind.
Humans may need 10,000 hours to master a skill.
Machines might eventually share those skills in seconds.
And if that model actually works, the way knowledge spreads across robotic systems could start looking very different.
For now I’m mostly curious to see how ROBO1 evolves as the network grows. Sometimes the projects that sound unusual at first are the ones worth watching a little more closely.
@Fabric Foundation #ROBO $ROBO
