
Something about modern robotics has been on my mind lately.
When people talk about robots, the focus usually goes straight to hardware.
Better sensors.
Stronger motors.
More advanced AI models.
All of those things matter.
But the more I learn about how robotics is evolving, the more it feels like the real shift might come from how robots gain new abilities over time.
Not just what a robot can do today.
But how it continues to learn tomorrow.
In most traditional systems, robots are designed with a fixed set of capabilities.
Engineers build the system, train the models, and deploy the machine with a specific range of tasks it can perform.
If the robot needs a new capability later, the update usually requires centralized development and major software changes.
That process works.
But it also slows down how robots evolve.
A different idea is starting to appear in newer robotics architectures.
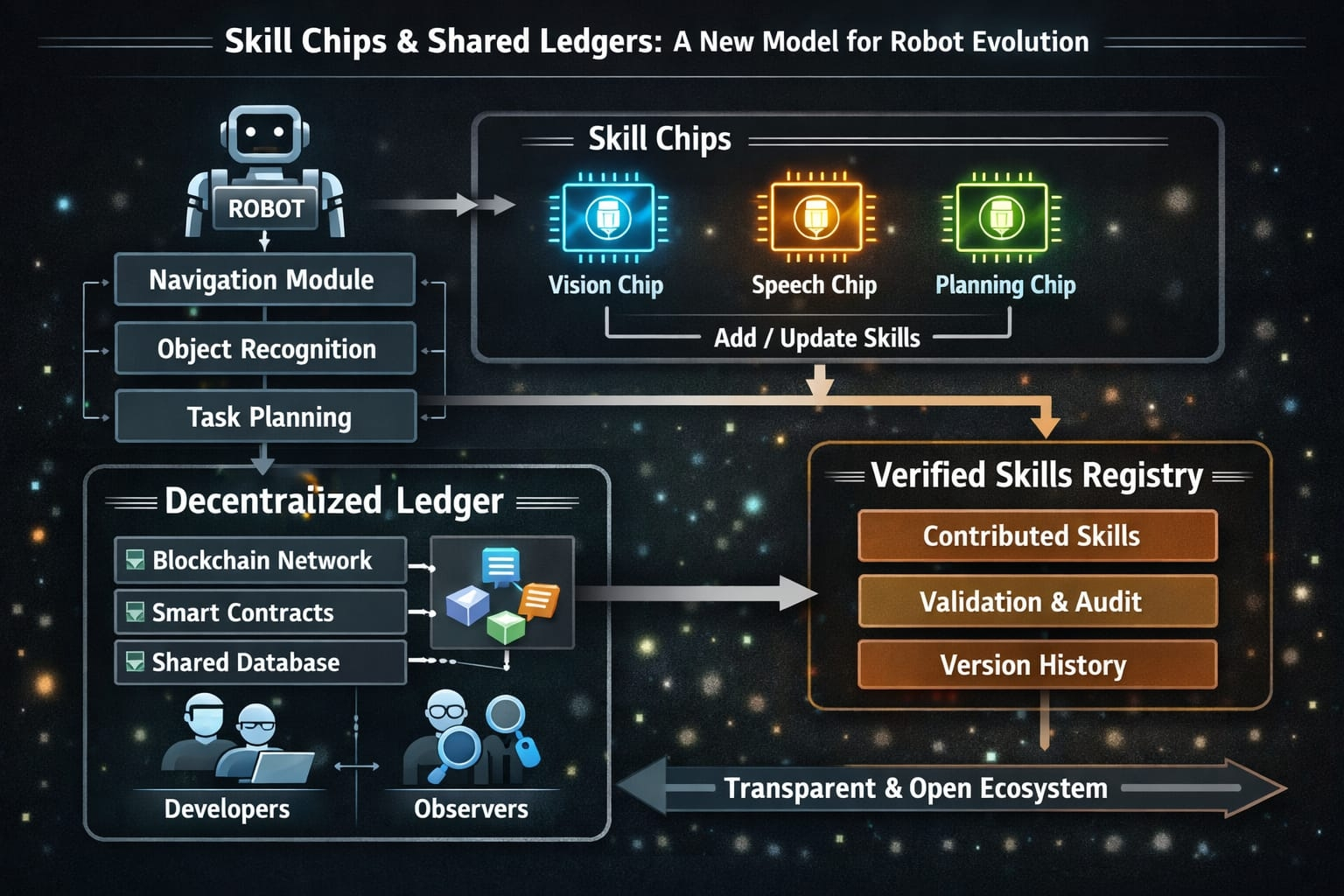
Instead of one large intelligence system that does everything, the robot’s cognition can be broken into smaller specialized modules.
Each module focuses on a specific function.
Navigation.
Object recognition.
Interaction with humans.
Decision making.
This is where Fabric’s idea of skill chips becomes interesting.
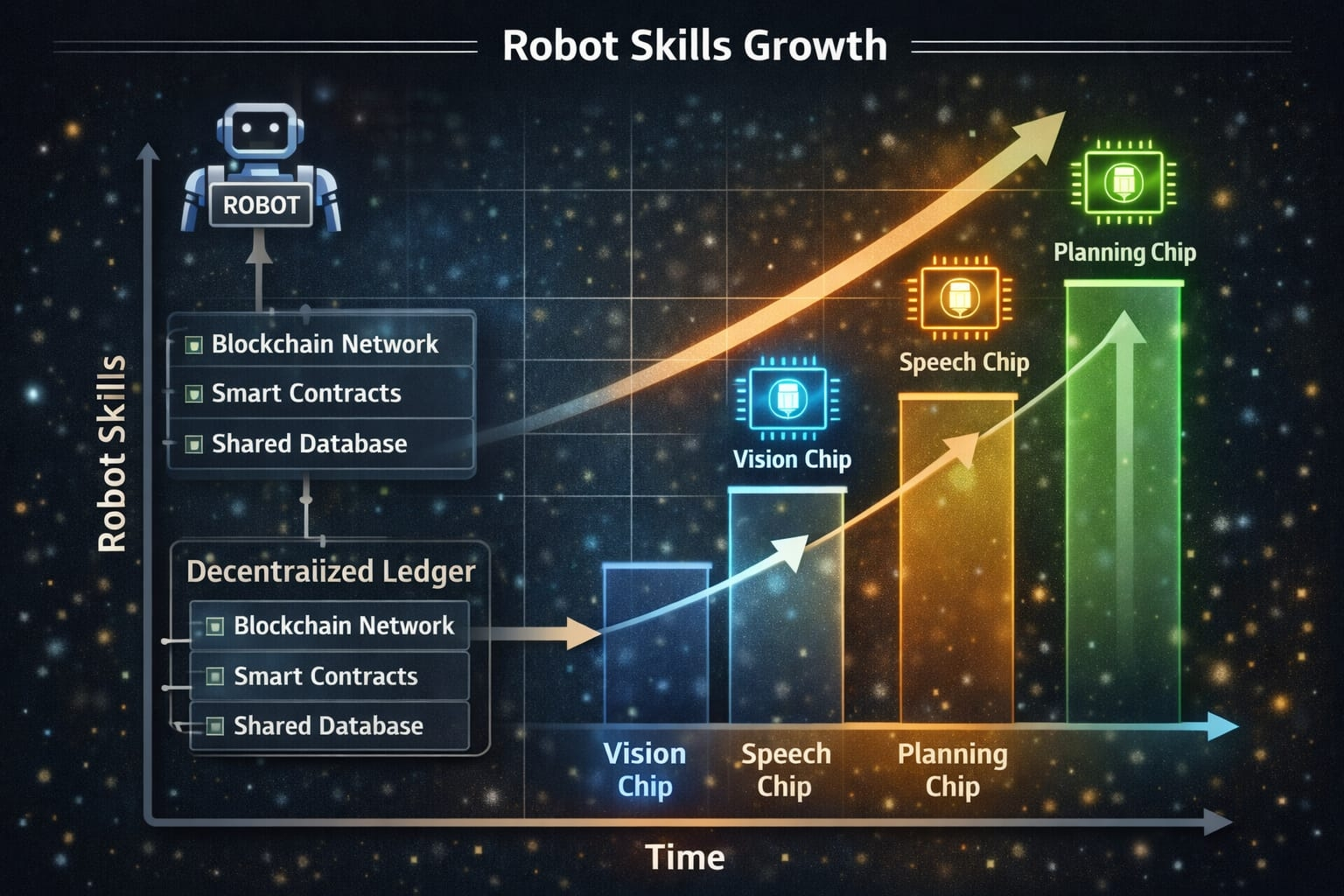
Think of a skill chip as a focused capability the robot can use.
One chip might allow the machine to recognize objects.
Another chip might help it understand spoken commands.
Another could handle task planning in complex environments.
Instead of rebuilding the robot every time something changes, new skills can simply be added.
And older ones can be replaced or improved.
This modular approach makes robots much more adaptable.
But there is another challenge hiding behind it.
If many developers contribute new skills, how do we keep track of them?
How do we know which capabilities are reliable?
How do we coordinate development across many participants?
This is where Fabric introduces another layer: shared ledgers.
Through a public ledger, the network can coordinate computation, ownership and oversight of robotic capabilities.
Rather than relying on closed systems controlled by a single operator, the infrastructure can make contributions visible and verifiable.
Developers can contribute skills.
Participants can observe how systems evolve.
And improvements become part of a shared ecosystem.
Seen this way, robot evolution may not come only from building better machines.
It may come from building open systems where intelligence grows piece by piece.
Where capabilities can expand over time.
And where the infrastructure supporting those machines becomes just as important as the machines themselves.
@Fabric Foundation #ROBO #robo $ROBO
