I have noticed that when people talk about autonomous machines, the conversation usually revolves around intelligence. Faster models, better sensors, smarter algorithms. Those elements are important, but the more I observe robotics systems operating in real environments, the more I think the bigger challenge is not intelligence at all. It is coordination. Autonomous machines can perform tasks independently, but the moment they start interacting with other systems, organizations, and economic processes, the question becomes much more complicated. Who verifies what those machines actually did? That is the question that led me to take a closer look at Fabric Protocol.
Most robotic systems today operate inside centralized frameworks. A company deploys machines, runs the control software, collects the operational data, and verifies whether tasks were completed. In many industrial environments, this arrangement works perfectly well. When one organization controls both the machines and the infrastructure around them, coordination is straightforward.
But the situation begins to change when autonomous machines move beyond single-owner ecosystems.
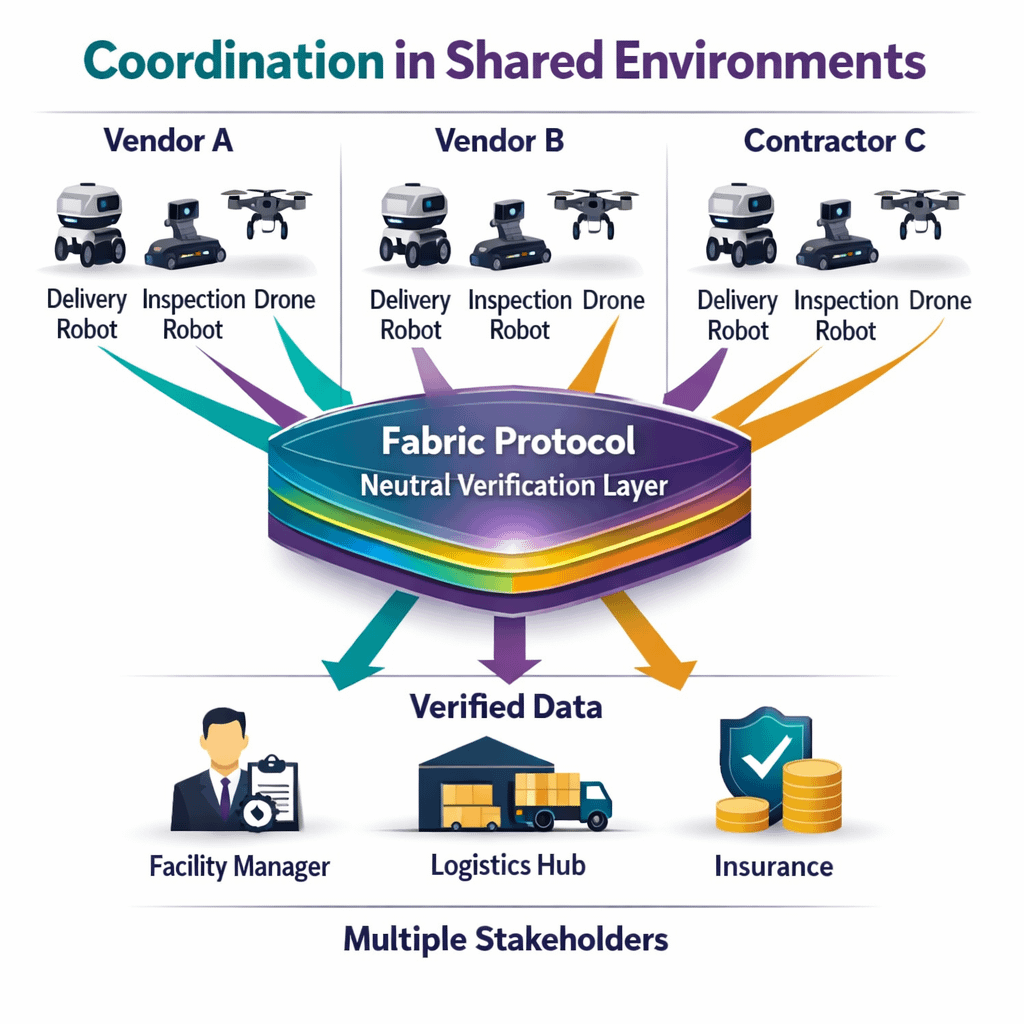
I think about logistics networks where delivery robots from different vendors operate within the same facility. Or infrastructure monitoring systems where drones, inspection units, and maintenance robots are deployed by separate contractors. In these environments, centralized coordination becomes harder to maintain. Each organization may rely on its own platform, its own logs, and its own interpretation of what actually happened.
That is where Fabric Foundation approach begins to make sense to me.
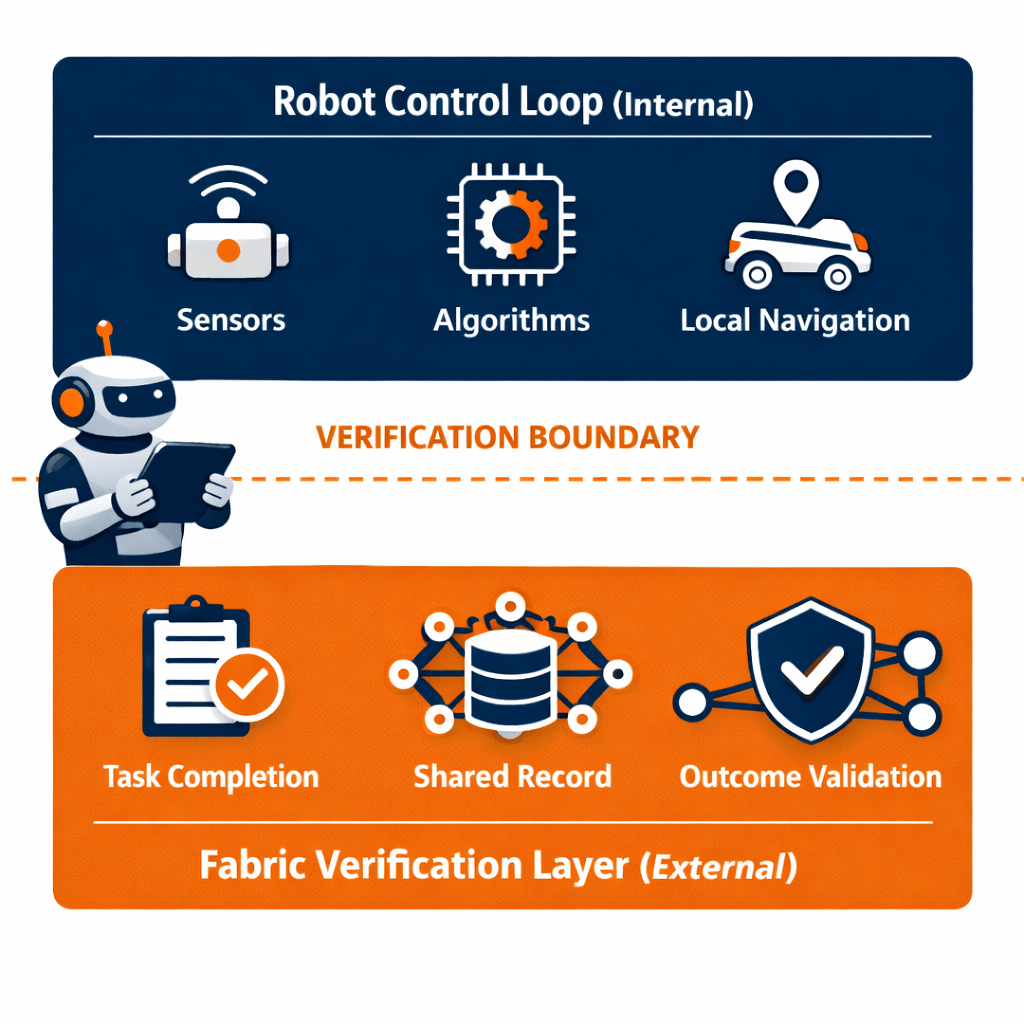
Instead of trying to control the robots themselves, Fabric focuses on verifying the outcomes of robotic activity. Machines continue operating within their own local systems, but their actions can be recorded and validated through a decentralized infrastructure layer. The goal appears to be creating a shared record of robotic work that multiple organizations can rely on without needing a single central authority.
From my perspective, that idea reframes what powering autonomous machines actually means.
It does not mean improving the intelligence inside the machine. It means improving the systems that coordinate and validate the machine’s work. In other words, Fabric seems less concerned with how robots think and more concerned with how their actions become economically and operationally meaningful.
Autonomous systems already operate under significant performance constraints. Robots must respond quickly to sensor inputs, navigate unpredictable environments, and adjust to changing conditions in real time. Introducing any additional infrastructure layer, especially one involving decentralized verification, naturally raises questions about latency, complexity, and operational overhead.
Centralized systems often succeed precisely because they simplify coordination. One platform records the activity, verifies the outcome, and resolves disputes if necessary. A decentralized verification layer introduces additional participants and processes that must all function reliably.
If that process becomes slow or complicated, operators may prefer the simplicity of centralized control.
What makes Fabric Foundation interesting to me is that it appears designed to avoid interfering with the robots’ real-time operations. Instead of inserting itself into the machine’s control loop, it focuses on recording and verifying outcomes after tasks are completed. That separation helps maintain the speed and responsiveness that autonomous machines require while still introducing a shared verification mechanism.
Another factor I keep thinking about is economic alignment.
Robots do not just perform tasks. They generate economic value. Autonomous delivery, infrastructure inspection, and environmental monitoring all involve multiple stakeholders. When machines perform work across organizational boundaries, questions of compensation, accountability, and verification naturally arise. Fabric Protocol seems designed to address that coordination layer rather than the robotics technology itself.
Whether that approach proves effective will likely depend on adoption in real operational environments.
Robotics infrastructure evolves slowly because reliability matters more than novelty. Systems must demonstrate that they can function under unpredictable conditions before organizations are willing to depend on them. A decentralized coordination layer might sound compelling conceptually, but it still needs to prove itself in environments where machines, operators, and institutions interact constantly.
For now, I see Fabric Foundation less as a replacement for existing robotics systems and more as an experiment in how autonomous machines might coordinate across decentralized networks. If robots continue expanding into shared environments where multiple stakeholders depend on their activity, the need for neutral verification layers may become harder to ignore.
Whether Fabric ultimately becomes one of those layers is still an open question, but it is the kind of infrastructure challenge that tends to reveal its importance gradually rather than all at once.