
The robot finished the task.
Grip closed.
Object placed exactly where it should be.
But nothing triggered.
No payment.
No coordination signal.
For a moment it looked like the robot failed.
It didn’t.
The network just couldn’t verify what happened yet.
That gap is small.
Milliseconds sometimes.
But that gap is where the entire robot economy breaks.
Robots don’t live inside the financial systems humans built.
They can’t open bank accounts.
They don’t carry passports.
They don’t receive invoices.
A robot can perform perfect work and still have no way to prove it happened in a system other machines trust.
Fabric exists exactly in that gap between action and verification.
Inside the network every robot carries an identity.
Not a name.
A machine identity tied directly to verifiable activity.
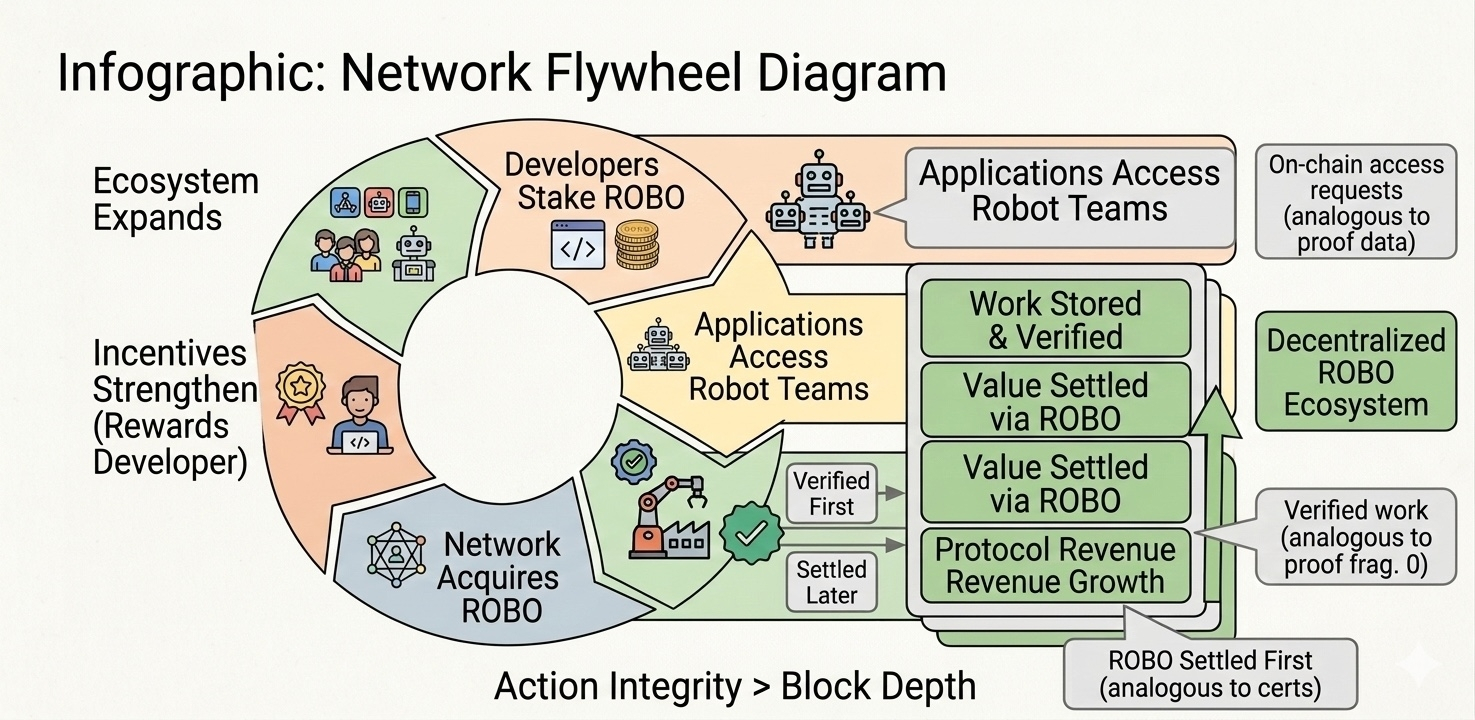
When a robot completes a task the action becomes attested state that other systems can read subscribe to and trigger logic from.
Payments governance and coordination only activate once that state becomes provable.
ROBO sits directly inside that layer.
Every verification step every identity update every payment settlement moves through it.
The robot finishes work.
Fabric confirms the state.
The value transfer follows through ROBO.
Suddenly the machine is no longer just hardware executing instructions.
It becomes an economic participant.

But verification is only one side of the problem.
The harder layer is coordination.
Deploying robots at scale is messy.
Machines activate at different times.
Tasks appear unpredictably.
Early deployment phases are unstable while systems learn how to distribute work efficiently.
Someone has to coordinate that process.
Fabric approaches that moment through ROBO participation.
Instead of selling ownership of robot hardware the network uses ROBO staking to coordinate activation and early task allocation.
Participants contribute tokens to access protocol functionality and receive priority access weighting during a robot’s initial operational phase.
Not ownership.
Coordination.
The system decides who interacts with the robot economy first while the network stabilizes around verified activity.
Once robots begin operating consistently another layer forms naturally.
Developers.
Businesses.
Operators building applications that depend on robot teams to complete real world tasks.
Access to that environment requires staking ROBO as well which aligns builders with the network they rely on.
The asset securing robot coordination becomes the same asset used for payments governance and participation.
At that point governance becomes unavoidable.
If machines are going to operate across industries someone has to decide how the network evolves.
Fee structures change.
Operational policies update.
Safety frameworks adapt as robots become more capable and more autonomous in the environments they operate inside.
ROBO holders participate in shaping those rules.
Not as passive investors.
As participants responsible for guiding how the network coordinates machine behavior at scale.
The long term goal isn’t just robotics infrastructure.
It’s an open system where humans and machines can collaborate without relying on a single centralized authority.
The distribution model reflects that long horizon.
Large portions of the supply are allocated toward ecosystem growth and something Fabric calls Proof of Robotic Work where verified machine activity becomes the basis for rewards.
Investor and contributor allocations unlock slowly across multiple years instead of short speculation cycles.
The structure is designed to support a network that runs continuously as robots generate work not just market hype around a token launch.
Which brings the question back to the original moment.
The robot finished the task.
Perfectly.
The only thing missing was proof the rest of the network could trust.
Fabric isn’t building robots.
It’s building the accounting layer that lets machines participate in an economy.
And once robots can generate verifiable work onchain…
who decides how that economy runs?