
A prima vista, il Fabric Protocol e OM1 sembrano concentrarsi principalmente sui pagamenti delle macchine. Le prime discussioni spesso evidenziavano l'idea di robot che detenevano portafogli digitali, ricevevano token e partecipavano ad attività economiche automatizzate.
Tuttavia, uno sguardo più attento all'architettura rivela un obiettivo più profondo. Fabric e OM1 sono progettati per creare un'infrastruttura di memoria condivisa in cui le macchine possono registrare, verificare e scambiare conoscenze.
Invece di trasmettere solo dati grezzi dei sensori o segnali di controllo, i robot possono produrre rapporti leggibili che descrivono ciò che hanno osservato e come hanno preso le loro decisioni. Fabric verifica questi rapporti e li memorizza come informazioni affidabili a cui altre macchine possono accedere e utilizzare.
Vista da questa prospettiva, la vera innovazione non è solo nel fatto che le macchine gestiscano pagamenti. È la possibilità che i robot possano costruire e fare affidamento su una memoria condivisa di esperienze.
Combinare Sensazione e Ragionamento: Il Pipeline Dati di OM1
OM1 è presentato come un sistema operativo di uso generale per robot. Nella pratica, i tutorial per sviluppatori mostrano che funziona come un layer strutturato che collega percezione, ragionamento e azione.
L'architettura è organizzata in moduli Python separati responsabili di quattro fasi principali:
Percezione
Memoria
Pianificazione
Azione
I sensori come telecamere, LiDAR o flussi di dati web alimentano informazioni nel layer di percezione. Questi dati vengono elaborati e convertiti in memorie e piani di alto livello che guidano le azioni del robot.
Una decisione di design importante è l'uso di una rappresentazione dei dati in stile linguistico. Invece di esprimere stati interni solo come vettori numerici, il robot genera testo leggibile che descrive le sue osservazioni e ragionamenti. Questo rende il sistema più facile da debug, modificare ed estendere. Consente anche a robot diversi di comprendere i rapporti degli altri.
Gli sviluppatori possono testare i robot in un ambiente di simulazione basato su browser chiamato WebSim. OM1 si integra anche con piattaforme di simulazione come Gazebo, consentendo agli sviluppatori di convalidare i comportamenti in un ambiente virtuale prima di implementarli su hardware reale.
Poiché OM1 è open source, gli sviluppatori possono aggiungere nuovi sensori o componenti robotici senza ridisegnare l'intera architettura. Questa flessibilità incoraggia la sperimentazione e la collaborazione.
L'intero pipeline trasforma gli input sensoriali grezzi in affermazioni chiare su ciò che il robot vede, comprende e pianifica di fare. Queste affermazioni possono poi essere condivise con altri sistemi.
Gli strumenti di simulazione giocano anche un ruolo importante in questo processo. Utilizzando ambienti come Gazebo o Isaac Sim, gli sviluppatori possono confermare che la descrizione interna di un robot degli eventi corrisponde a ciò che accade realmente nell'ambiente. Questo crea una forma di gemello digitale in cui sia il robot virtuale che quello fisico operano utilizzando la stessa logica.
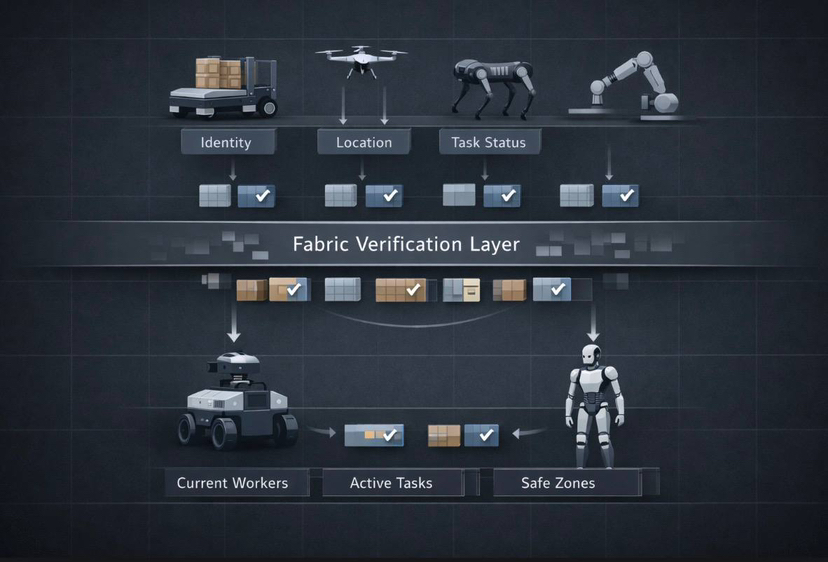
Layer di Verifica del Fabric: Costruire Fiducia tra Macchine
Mentre OM1 si concentra su come i robot interpretano e descrivono il mondo, il Fabric si concentra sulla verifica e distribuzione di tali informazioni.
In molti sistemi robotici attuali, le macchine condividono dati grezzi come mappe, immagini o segnali di navigazione. Il Fabric introduce un passaggio aggiuntivo. Prima che un robot accetti informazioni da un altro robot, verifica l'identità, la posizione e l'attività del mittente.
Il Fabric funge da rete di comunicazione sicura in cui le macchine possono confermare chi sono e scambiare contesto in tempo reale.
Quando un robot completa un compito o sviluppa una nuova capacità, registra un rapporto che include una prova crittografica. Questo rapporto viene inviato alla rete Fabric. I nodi all'interno della rete controllano l'identità del mittente e verificano che le informazioni seguano il formato richiesto.
Una volta verificata, l'informazione diventa parte del registro condiviso. Altri robot possono quindi accedere a queste informazioni e fidarsi che siano state prodotte da una fonte nota e verificata.
Questo processo trasforma esperienze robotiche isolate in una base di conoscenza condivisa.
Per esempio, considera un robot che lavora in un magazzino. Se scopre un percorso più veloce tra le corsie di stoccaggio, può caricare il percorso di successo nella rete insieme a prove che il percorso funziona. Altri robot possono recuperare quell'informazione e beneficiarne immediatamente.
Invece di ogni robot che impara la stessa lezione in modo indipendente, la conoscenza si accumula attraverso la rete.
In questo senso, il Fabric opera più come una piattaforma di conoscenza collaborativa per le macchine piuttosto che semplicemente come un'infrastruttura finanziaria.
La Conoscenza come Risorsa: L'Economia dell'Intelligenza delle Macchine
Se i robot possono produrre conoscenza utile e verificata, quella conoscenza stessa potrebbe diventare economicamente preziosa.
Alcuni analisti suggeriscono che il Fabric potrebbe abilitare mercati in cui le informazioni generate dalle macchine sono tokenizzate e scambiate. In un tale sistema, i robot potrebbero generare conoscenze specializzate come mappe di navigazione, strategie di movimento ottimizzate o procedure specifiche per compiti.
Questi pezzi di informazione potrebbero essere confezionati in unità di dati standardizzate e resi disponibili ad altre macchine o sviluppatori.
A differenza dei token di uso generale come $ROBO, questi token di conoscenza rappresenterebbero intuizioni specifiche prodotte da robot che svolgono compiti nel mondo reale. Il loro valore potrebbe dipendere da fattori come utilità, rarità e affidabilità.
Un robot che genera costantemente conoscenze preziose potrebbe ricevere ricompense maggiori rispetto a uno che svolge compiti ripetitivi.
Questo modello sposta parte dell'economia robotica dall'hardware verso l'informazione. Invece di concentrarsi solo sulla costruzione di macchine migliori, il valore potrebbe derivare sempre più dalla conoscenza che quelle macchine generano.
Tuttavia, questo concetto solleva anche domande importanti. Chi possiede la conoscenza prodotta da un robot? Come può essere verificata la qualità di quella conoscenza? Grandi organizzazioni potrebbero controllare o limitare l'accesso a dati preziosi?
Affrontare questi problemi potrebbe richiedere nuovi quadri legali e normativi che vadano oltre le tradizionali licenze software open source.
Compromessi e Sfide
L'idea di un sistema di memoria condivisa per le macchine introduce anche diverse sfide tecniche e sociali.
Un problema è il costo computazionale. Verificare grandi numeri di rapporti su un registro distribuito richiede un notevole potere di elaborazione. Se la rete diventa troppo lenta, il coordinamento robotico in tempo reale potrebbe essere influenzato.
La privacy è un'altra preoccupazione. Rapporti dettagliati sull'attività dei robot possono includere informazioni sensibili su luoghi, operazioni o individui. Senza meccanismi di filtraggio e protezione adeguati, tali sistemi potrebbero sollevare preoccupazioni di sorveglianza.
L'adozione della rete gioca anche un ruolo cruciale. Un sistema di memoria condivisa diventa prezioso solo se molti produttori e sviluppatori adottano lo stesso standard. Se diverse aziende creano sistemi separati, la conoscenza potrebbe diventare frammentata tra reti concorrenti.
Altri fattori come il consumo energetico, i requisiti normativi e la complessità del sistema influenzano anche quanto pratico potrebbe essere tale rete su larga scala.
Bilanciare fiducia, efficienza e apertura determinerà probabilmente se una memoria condivisa delle macchine può avere successo.
Conclusione
Guardando oltre il focus sui token si rivela una visione più ampia dietro il Fabric Protocol e OM1. La vera trasformazione potrebbe non essere robot che detengono portafogli digitali o ricevono pagamenti.
Invece, potrebbe risiedere nella capacità delle macchine di descrivere le loro esperienze in un linguaggio comprensibile e contribuire a queste esperienze a una memoria condivisa.
OM1 fornisce la struttura che consente ai robot di convertire percezione e ragionamento in rapporti leggibili. Il Fabric garantisce che questi rapporti siano verificati e archiviati come informazioni affidabili.
Se questo modello ha successo, l'economia robotica potrebbe evolversi attorno alla conoscenza condivisa piuttosto che a macchine isolate. I robot non agirebbero solo in modo indipendente, ma imparerebbero anche collettivamente dalle esperienze degli altri.
Questa visione solleva domande complesse su proprietà, privacy e governance. Allo stesso tempo, offre un percorso verso sistemi di macchine più collaborativi, trasparenti e adattabili.