
 Robotics is entering a phase where complexity is growing faster than coordination systems can handle. Autonomous machines are no longer limited to isolated factory floors. They are beginning to operate across logistics networks, industrial plants, urban infrastructure, and digital marketplaces. As this shift unfolds, a fundamental question emerges. How do we design infrastructure that allows thousands of machines to interact safely, efficiently, and transparently?
Robotics is entering a phase where complexity is growing faster than coordination systems can handle. Autonomous machines are no longer limited to isolated factory floors. They are beginning to operate across logistics networks, industrial plants, urban infrastructure, and digital marketplaces. As this shift unfolds, a fundamental question emerges. How do we design infrastructure that allows thousands of machines to interact safely, efficiently, and transparently?
Fabric Protocol approaches this challenge with a modular infrastructure philosophy. Instead of building one monolithic robotics platform, it creates a layered architecture where different components perform specialized roles. This design mirrors how successful digital systems evolve. The internet scaled because networking, security, and applications developed as independent layers rather than a single rigid framework. From my perspective, this modular approach is one of the most important architectural decisions for scalable robotics networks.
Traditional robotic systems are built around closed environments. A manufacturing robot interacts with internal sensors, centralized software, and controlled workflows. That structure works well in a contained ecosystem. However, once robots begin interacting across companies, cities, and supply chains, the limitations become obvious. A single centralized system cannot efficiently coordinate machines owned by different organizations with different governance requirements. Enterprises require flexibility, regulators require transparency, and developers require programmable interfaces.
Modular infrastructure solves this by separating responsibilities into independent layers. Each layer can evolve, upgrade, or scale without disrupting the entire system. Fabric Protocol adopts this philosophy to support complex robotics ecosystems where machines, software agents, and economic systems interact simultaneously.
"When robots begin making decisions with logic and precision,
Fabric’s system will bring trust into every mission.
Data stays secure and computation remains transparent,
Humans and machines move forward within one shared system."
Fabric Protocol organizes its infrastructure into several functional layers that together create a coordinated robotics network. The first layer is identity infrastructure. Every robot or autonomous agent requires a secure digital identity. Without identity verification, accountability becomes impossible. Fabric establishes machine level identity that can link devices to permissions, ownership structures, and operational roles.
The second layer is verifiable computing. Robots increasingly rely on artificial intelligence to make operational decisions. Verifiable computing ensures that these decisions can be validated rather than blindly trusted. Computational outputs can be proven correct through cryptographic verification, creating transparency between participants.
The third layer is the public ledger coordination system. This layer records events, proofs, and governance signals. It acts as the shared verification backbone that allows independent actors to trust machine activity without relying on centralized control.
The fourth layer is governance logic. Rules can be encoded directly into the infrastructure. Machines interacting with physical systems must operate within clearly defined permissions. Governance logic ensures that robots follow authorized behaviors and that violations can be automatically flagged or rejected.
Together these layers form a modular robotics infrastructure where each component serves a specialized purpose. The modular approach offers several strategic advantages that become clearer as robotics networks expand.
First is flexibility. Different industries have different operational requirements. A logistics robot may prioritize real time decision speed, while healthcare robotics may emphasize compliance and auditability. Modular systems allow organizations to adapt layers according to specific needs.
Second is scalability. When infrastructure components are modular, developers can upgrade individual layers without rebuilding the entire system. This significantly accelerates innovation cycles.
Third is interoperability. Robots developed by different manufacturers can integrate through shared coordination layers rather than proprietary interfaces. This is essential for cross industry collaboration.
A strong visual could be placed here showing the modular architecture of Fabric Protocol. At the base are physical robots and autonomous devices. Above them sits the identity layer assigning secure machine identities. The next layer represents verifiable computing validating robotic decisions. Above that is the public ledger coordination layer recording actions and proofs. At the top sits the governance layer enforcing operational rules. This illustration would clearly show how modular components interact to create a cohesive infrastructure system.
If Fabric Protocol successfully establishes modular robotics infrastructure, the opportunities extend across multiple sectors. Developers could build applications for robotic networks without needing to design full coordination systems from scratch. Enterprises could integrate automation solutions while maintaining verifiable compliance records across jurisdictions. Infrastructure providers could create specialized modules that plug into existing coordination layers.
From an investment perspective, infrastructure platforms that support ecosystem expansion often capture long term value. As robotics adoption grows across industries, coordination infrastructure may become a critical backbone rather than a niche technological layer.
However, the challenges remain significant. Robotics systems often require near real time responsiveness. Verification layers must be designed carefully to avoid slowing operational performance. Adoption is another major factor. Infrastructure becomes valuable only when participants use it. Fabric Protocol must attract developers, robotics manufacturers, and enterprise partners to create meaningful network effects.
Regulatory complexity also cannot be ignored. Autonomous machines interacting with physical infrastructure raise questions around accountability, liability, and safety compliance. Modular governance frameworks must be flexible enough to adapt to different legal environments.
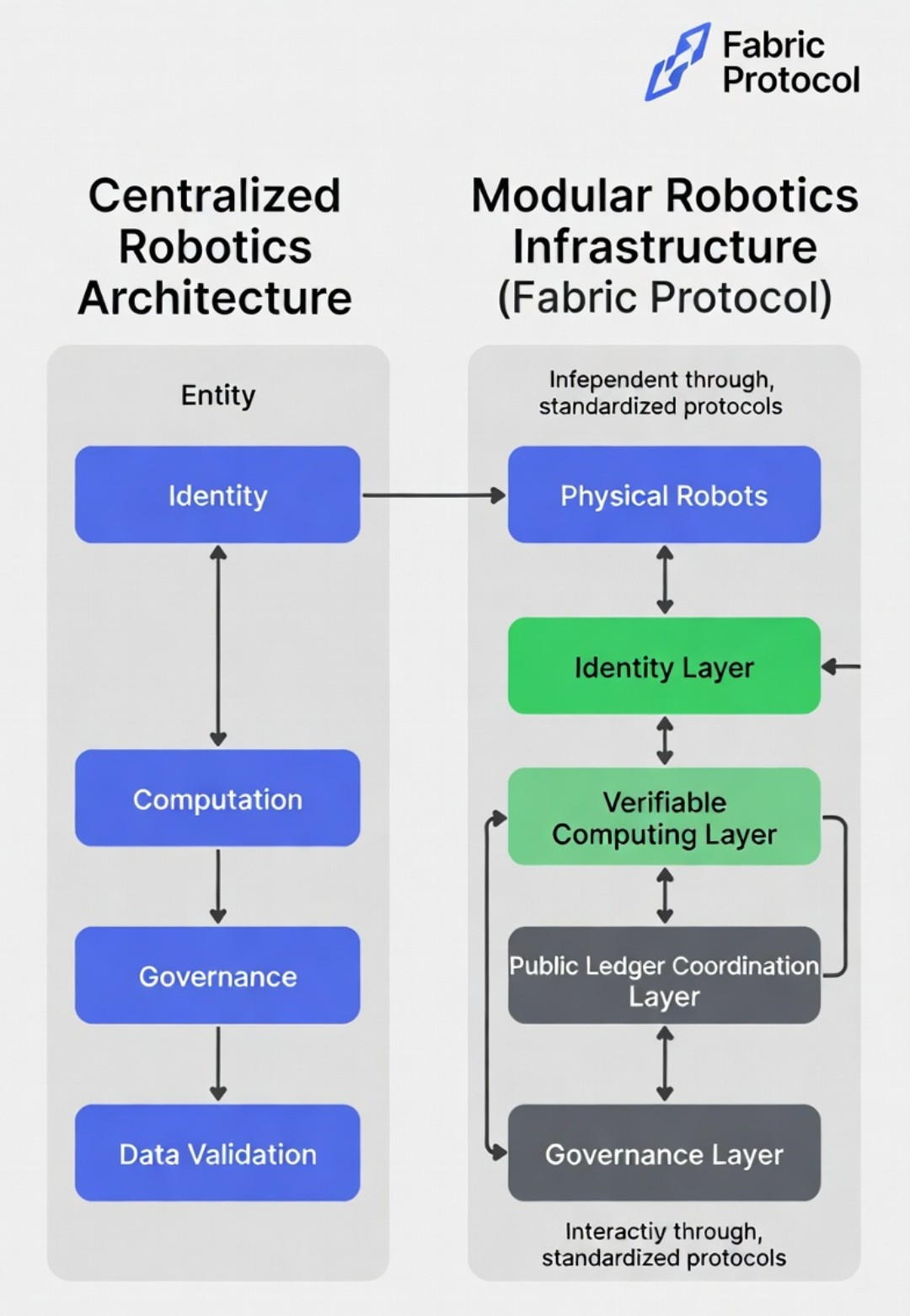
Another useful visual could compare centralized robotics architecture with modular robotics infrastructure. The centralized model shows a single company controlling identity, computation, governance, and data validation. The modular model illustrates independent layers interacting through standardized protocols. This comparison would clearly demonstrate why modular systems are more resilient and scalable for large robotic networks.
When analyzing Fabric Protocol through a long term infrastructure lens, the modular approach stands out as a rational design choice. Complex systems rarely scale when everything is tightly integrated. The internet succeeded because communication protocols, security layers, and application frameworks evolved independently while remaining compatible.
Robotics networks are likely to follow a similar trajectory. However, the real validation will come from ecosystem traction. Infrastructure becomes meaningful when developers build on it, enterprises integrate it, and regulators recognize its governance mechanisms.
For investors, modular infrastructure projects should be evaluated through adoption metrics rather than short term market volatility. Developer engagement, partnership announcements, and real world integrations provide stronger signals than speculative momentum.
For builders, modular frameworks offer a powerful opportunity. Designing robotics applications on top of shared infrastructure reduces development complexity and improves interoperability. For enterprises, modular systems reduce operational risk by allowing gradual integration of autonomous machines within verifiable governance frameworks.
The robotics industry is approaching a turning point. As machines become more intelligent and interconnected, coordination challenges will intensify. Fabric Protocol attempts to address this challenge through modular infrastructure that separates identity, verification, governance, and coordination into specialized layers.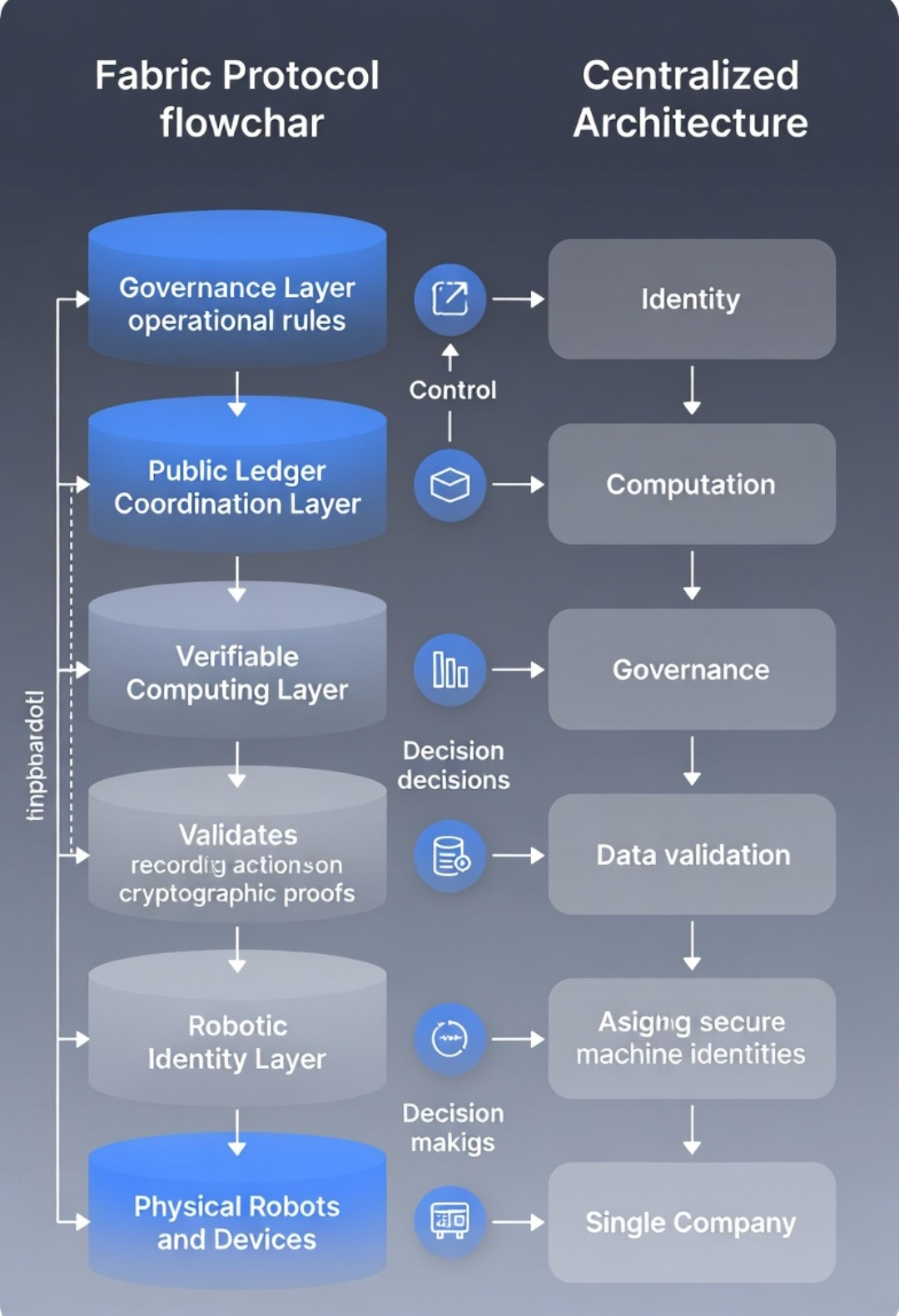
If successful, this architecture could transform robotics from isolated automation systems into large scale collaborative networks. The future of robotics will not depend only on smarter machines. It will depend on the infrastructure that allows those machines to interact within trusted systems. Modular architecture may ultimately become the foundation that allows robotics ecosystems to scale globally while maintaining transparency, security, and accountability.