
The first robotics lab I spent time in was quieter than most people expect.
No dramatic mechanical movements. No cinematic machines building other machines. Just rows of sensors quietly feeding data into control systems while robotic arms performed small, repetitive tasks with careful precision. Cameras tracked objects. Lidar maps updated continuously. Software models interpreted signals and converted them into movement.
The real complexity wasn’t the hardware. It was coordination.
Every robot depended on a constant stream of reliable information. Sensors observed the environment. Software interpreted it. Control systems issued decisions. The loop repeated thousands of times per minute. If any layer failed, data accuracy, verification, control logic, the entire system degraded.
Watching that process changed how I evaluate robotics infrastructure.
Autonomy is not just about machines acting independently. It is about whether the information pipeline that drives those decisions can be trusted.
Years later, when I began examining blockchain systems that claim to support machine economies, that same question returned: where exactly does trust come from when machines begin making economic decisions?
Fabric Protocol is one attempt to answer that question.
But understanding the framework requires stepping away from the usual crypto narratives and looking instead at the mechanics of robotics itself.
Where Robotics Systems Actually Struggle
Robotics systems today are remarkably capable in controlled environments. Industrial automation has reached extraordinary levels of reliability in factories, warehouses, and logistics hubs.
But autonomy weakens quickly when machines operate outside tightly managed settings.
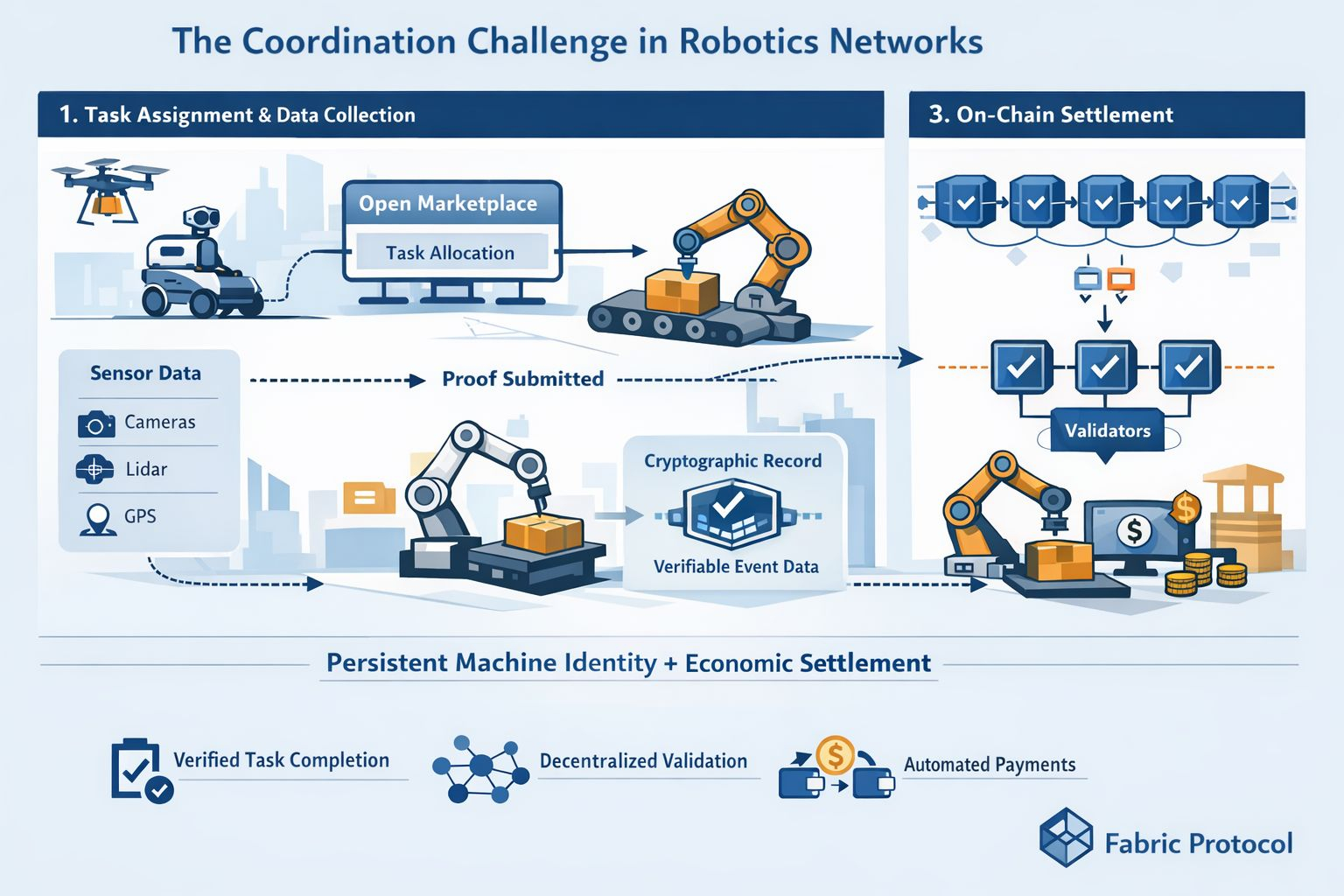
Robots rely on sensor data streams: cameras, radar, GPS, temperature sensors, pressure readings, positional feedback. Those signals feed machine learning models that determine how a robot interprets its surroundings and decides what to do next.
The challenge is not collecting data.
The challenge is verifying that the data and the resulting decisions remain trustworthy across distributed system.
In centralized environments, verification is relatively straightforward.
Delivery robots operate in public environments. Autonomous vehicles interact with infrastructure they do not control. Industrial robots collaborate across multiple companies within supply chains.
Coordination becomes more complicated when machines belonging to different organizations begin interacting.
This is the structural gap Fabric Protocol attempts to address.
The Idea Behind Fabric’s Robotics Framework
Fabric Protocol proposes a decentralized coordination layer designed specifically for robotic systems.
Rather than relying on a single organization to verify data and decisions, the framework distributes certain verification and coordination functions across a network.
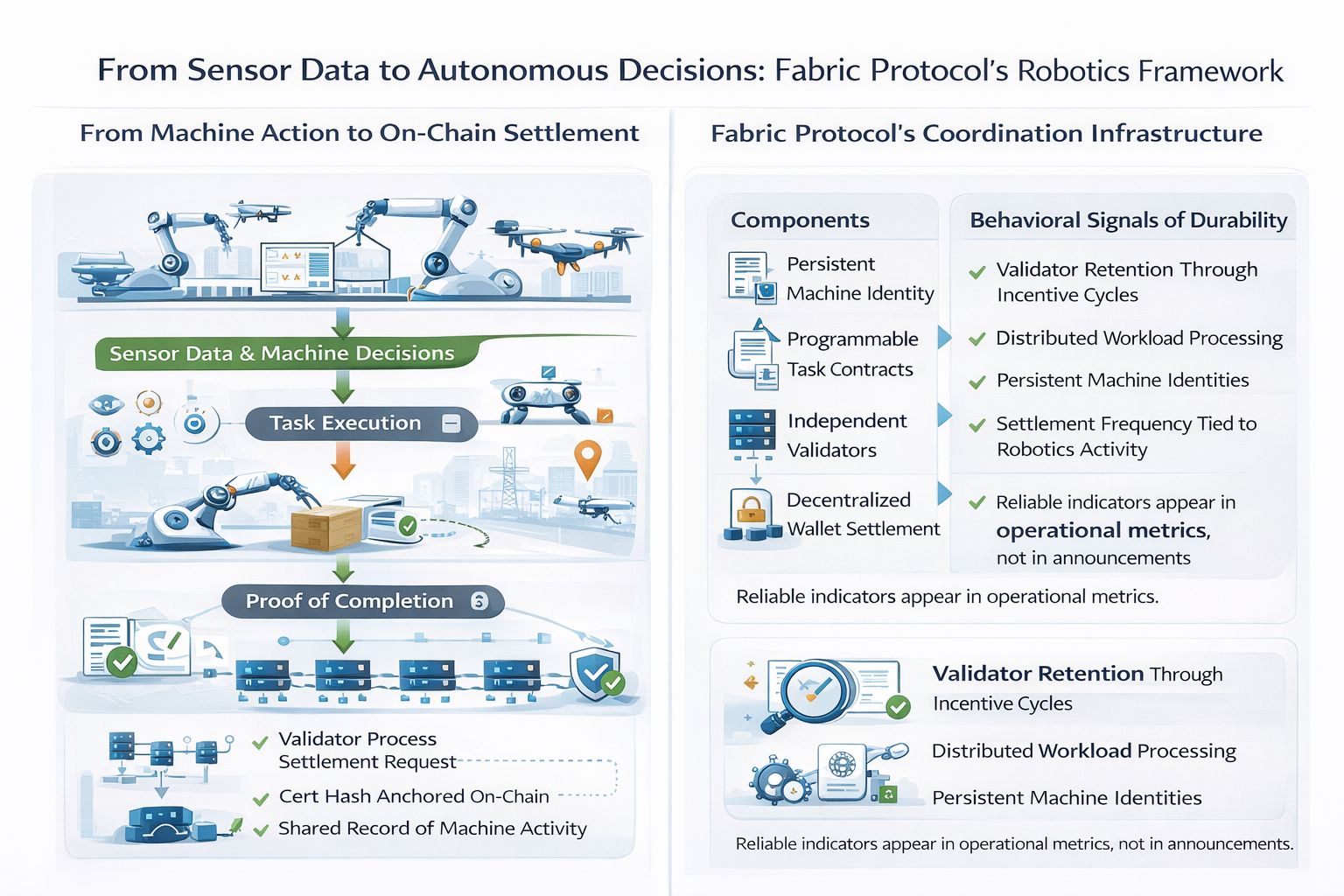
At a high level, the structure resembles a shared infrastructure layer where machines can:
• Anchor sensor data
• Record operational states
• Validate decisions or outcomes
• Coordinate economic transactions tied to robotic activity
The intention is not to control robots directly.
Instead, the protocol attempts to create a verifiable record of machine activity and machine driven decisions that can be trusted across organizational boundaries.
In theory, this could allow robots owned by different entities to interact economically while relying on a neutral coordination layer.
It is a concept that becomes more relevant as robotics moves toward service networks rather than isolated deployments.
Still, the important question is not whether the architecture is technically interesting.
The real question is whether incentives make the system usable.
The Hard Part: Turning Machine Activity Into Verifiable Events
Robotics generates enormous volumes of sensor data. Most of it is ephemeral and context specific.
Only a small portion of that data needs to be preserved for coordination or verification purposes.
Examples might include:
• confirmation that a task was completed
• verification that a robot reached a certain location
• confirmation that an environmental reading crossed a threshold
• validation that a machine executed a specific instruction
These events can then be cryptographically recorded and referenced across participants.
The value is not in storing everything.
The value is in creating shared checkpoints of truth within systems that otherwise operate privately.
This approach mirrors how financial infrastructure records transactions rather than every internal computation that leads to them.
Still, the implementation raises a deeper operational question.
How does the system determine whether a recorded event actually happened?
Verification Remains the Critical Layer
In robotics, sensors are not neutral observers.
Centralized operators deal with these issues through redundancy and calibration.
A decentralized system must rely on different mechanisms.
Fabric’s approach appears to lean on multiple layers of verification, where machine events can be cross referenced through additional sensors, external validators, or cryptographic proofs tied to device identities.
If these mechanisms work reliably, they could create a neutral verification layer for robotic systems.
If they fail, the network risks recording events that look legitimate but reflect inaccurate inputs.
The difference matters.
Because once machines begin making economic decisions, payments, service commitments, access to shared infrastructure verification errors can translate directly into financial risk.
Economic Identity for Machines
Another component of Fabric’s framework involves giving robots a form of autonomous economic identity.
In practice, this means machines can interact with the network through wallets, credentials, and programmable permissions.
What Fabric attempts to add is a coordination layer that links those economic interactions with verifiable operational events.
A robot could theoretically:
• request a service
• verify completion through recorded events
• trigger payment automatically through smart contracts
In tightly scoped environments, this type of automation can reduce coordination costs.
But it also introduces governance challenges.
It cannot easily interpret intent.
That distinction becomes important when autonomous systems begin interacting financially.
Incentives Reveal Whether Infrastructure Works
One lesson from studying blockchain infrastructure is that architecture alone rarely determines success.
Incentives determine behavior.
If Fabric’s network requires validators, data verifiers, or infrastructure providers, those participants must have clear economic motivation to behave honestly.
Otherwise the verification layer gradually weakens.
We have seen this dynamic across many blockchain networks. Early participation often looks healthy because incentives are temporarily elevated. The real signal appears after those incentives stabilize.
Do participants continue validating events because the infrastructure is genuinely useful?
Or because the token economics temporarily compensate for low organic demand?
Over time, participation patterns answer that question more clearly than whitepapers.
The Coordination Question
Robotics is entering a phase where machines will increasingly interact across organizational boundaries.
Autonomous delivery systems share urban infrastructure. Industrial robots coordinate across suppliers and manufacturers. Agricultural machines interact with distributed data networks.
These environments require coordination layers that extend beyond a single operator.
Fabric Protocol is exploring one possible approach: anchoring robotic events and economic interactions within a decentralized infrastructure.
The architecture is conceptually sound. But concept alone does not determine durability.
Two uncertainties remain particularly relevant.
First, whether verification mechanisms can reliably translate real-world machine activity into trusted digital events.
Second, whether the economic incentives supporting that verification layer remain stable once early enthusiasm fades.
Infrastructure tends to reveal its resilience slowly.
Sometimes the most useful systems are the ones that attract little attention because they quietly become necessary.
Whether Fabric evolves into that kind of infrastructure remains an open question.
But the direction it explores reflects a broader shift already underway.
Machines are beginning to participate in economic systems.
The challenge now is deciding how much trust we are willing to place in the signals that guide their decisions.
@Fabric Foundation #ROBO $ROBO
