When you walk into robotics labs these days you will notice something interesting. The hardware is getting better and better. Sensors are getting sharper motors are getting smoother and batteries are lasting longer. The intelligence inside many robots still feels like it is not changing. If a machine learns one skill adding another often means rewriting parts of its software. This slows everything down in practice.
A growing group of researchers thinks that robots should evolve like smartphones did. Of rebuilding the entire system each time a new ability is needed you can install a small module that adds the skill instantly. This idea is at the center of a project called @Fabric Foundation , which imagines a future where robots download capabilities from something that looks a lot like an app store. The concept may sound like something from the future. The technical pieces behind it are already being explored.
A modular way to teach robots is what they are trying to do.
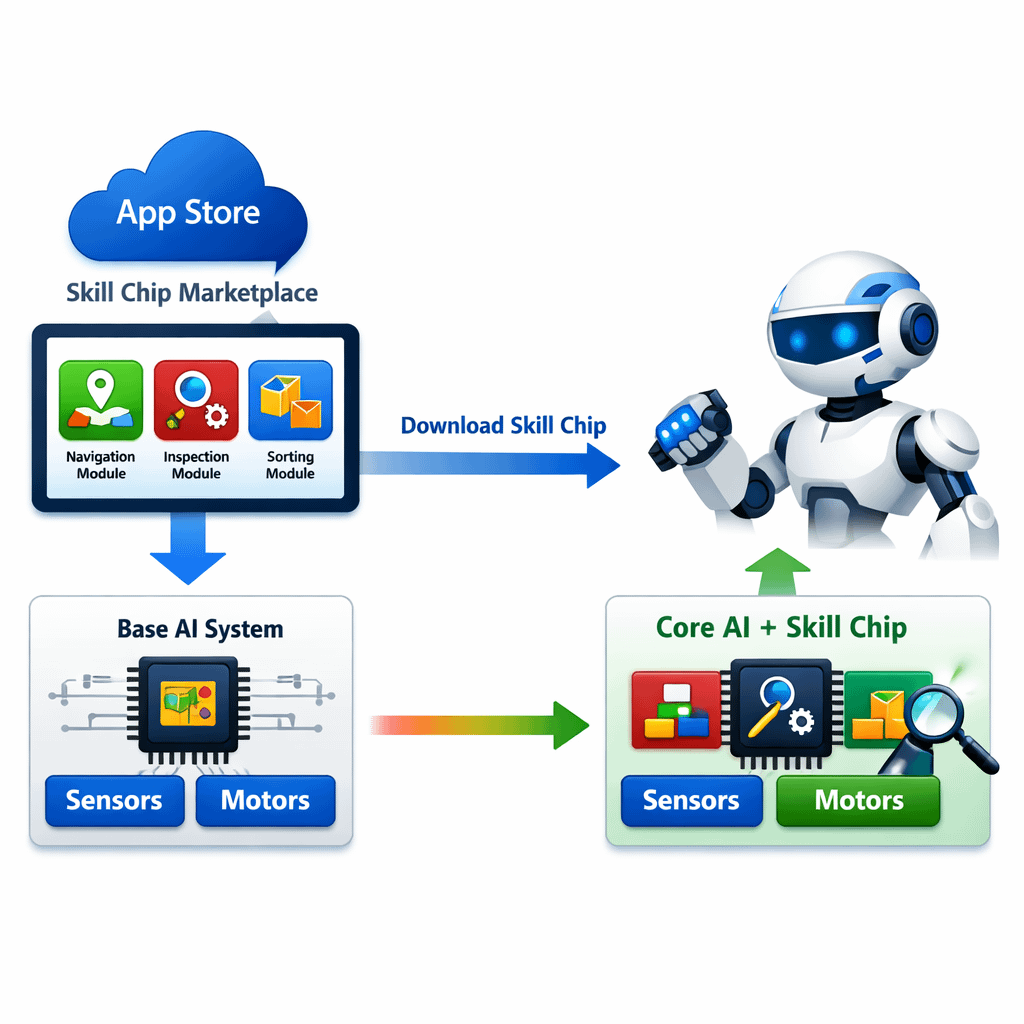
At the heart of the Fabric ecosystem is the idea of "skill chips." Think of them as software packages that contain a specific capability. One chip might teach a robot how to recognize packages on a warehouse shelf. Another might help it navigate hallways. A third could contain a procedure for folding laundry or assisting in a hospital room. Of coding these behaviors from scratch every time developers package them into reusable modules. Robots can download the chip integrate it with their existing system and begin using the skill.
The approach builds on the architecture being developed by OpenMind and the Fabric Protocol. In that system the robot’s internal intelligence layer handles perception and reasoning while Fabric coordinates communication, identity and task management between machines across a network. This separation matters. It means the robot’s "brain" can stay relatively stable while new abilities are plugged in from the outside.
The idea of a robot app marketplace is what they are trying to do.
If skill chips are the building blocks the next step is distribution. Fabric’s long-term vision includes a marketplace where developers upload these modules and robots download them as needed. Imagine a warehouse robot encountering a type of shelving system. Of returning to the manufacturer for a software update it could retrieve the appropriate navigation chip from the marketplace and install it within minutes. The same robot might later download a module for inventory scanning.
The marketplace also creates incentives for developers. Engineers who design a robotic skill could publish it to the network and receive compensation whenever robots use it. This model is similar to the economics of mobile app ecosystems, where independent developers contribute functions that expand the platform’s usefulness. The difference is that the "users" in this case are machines.
Fabric also introduces identity for robots. Each machine on the network receives a digital identity allowing it to authenticate with others and record tasks on chain. In theory this makes it possible for robots from manufacturers to cooperate without relying on a single central server.
Why modular intelligence matters is because robots today are often custom-built for tasks. A machine designed for warehouse logistics rarely adapts easily to agriculture or healthcare.
A skill-based architecture changes that dynamic.
Of designing entirely new robots for each environment engineers could reuse hardware while swapping out skill modules. The same machine might operate as a delivery robot during the day and a cleaning assistant at night depending on the installed chips. Over time this could create a shared library of robotic knowledge. When one robot learns a way to perform a task the method could be packaged as a chip and shared with thousands of others. In theory that collective learning could accelerate robotics development in the way open-source software accelerated computing.
The infrastructure behind the idea is what they are trying to build.
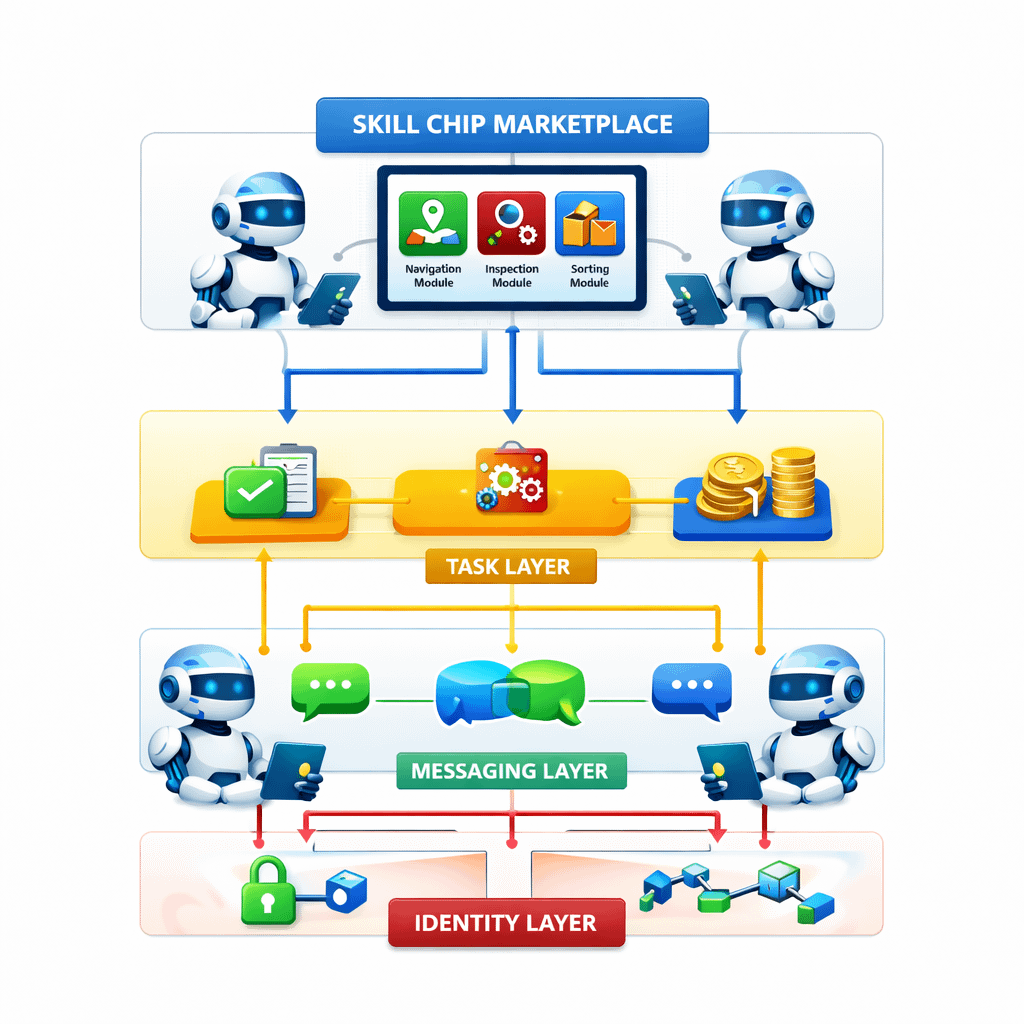
Fabric’s architecture tries to support this world through several layers. First comes identity, which assigns every robot a signature so its actions can be verified. Then a messaging layer allows machines to exchange information directly. Above that sits a task layer where jobs can be posted, accepted and verified. Once the work is confirmed the network records the result. Distributes rewards automatically. The protocol also relies on decentralized computing infrastructure to spin up the environments needed to run these skills. Taken together the system tries to make intelligence portable.
Where the risks appear is in security. If robots begin installing skill modules from marketplaces the risk of malicious code becomes real. A compromised skill chip could cause damage in the real world, which makes software verification much more critical than in ordinary apps. Another issue is reliability. Robotics operates in environments where sensors fail and conditions change. A skill that works perfectly in one setting might behave unpredictably else.
There is also the question. While the token-based incentives proposed by Fabric aim to reward developers and machine operators the real demand for robot task markets remains largely untested. Many robotics platforms today still rely on enterprise contracts rather than decentralized marketplaces. Perhaps the biggest uncertainty is simply time. Projects like Fabric are still early in development. Remain largely experimental with much of the infrastructure in prototype or research stages.
A quiet shift in how machines learn is what is happening.
With those risks the underlying idea continues to attract attention. The notion that robots might one day upgrade themselves the way phones install apps feels both simple and powerful. If the model works robotic intelligence may stop being something that ships with a machine. Instead it could become something that grows continuously downloaded, shared and improved across a network.
For now the robot app store remains vision than reality.. The pieces are slowly taking shape and each experiment brings the concept a little closer, to the real world.
