⚡ Let me tell you about a simulation that went sideways last fall.
We had a five-node robotics coordination testbed — mixed hardware, no shared identity layer, custom incentive contracts bolted on top of each other like scaffolding on a crumbling wall. The agents were completing tasks, logging outputs, collecting simulated fees. Looked fine until week three. Then the reward distribution started drifting. Slowly at first — then catastrophically. Contributions were being counted twice. Bad data was getting scored as verified work. By the time we caught it, the simulated treasury had haemorrhaged 22% to ghost completions.
That wasn't a code bug. That was an alignment architecture failure. No verifiable compute trail. No onchain heartbeat checks. No stake-backed accountability for operators who quietly clocked off. We'd built an economy that rewarded appearing to work, not proving it.
That's exactly the problem Fabric Foundation is building against. And if you're staking ROBO, operating on Base, or prototyping skill chips right now — understanding the mechanics behind this matters more than the price chart.
The Setup: Why Robot Economies Break Before They Scale
Fabric coordinates data, computation, and human oversight through public blockchain ledgers — an open network where robots are built, governed, and evolved. MEXC That's the mission. But the architecture underneath is where the real work lives.
Here's the fundamental asymmetry most builders miss: a robot completing a task in the physical world generates an output that is hard to verify remotely. Did it actually shelve 200 units? Did it navigate safely? Did the data it submitted reflect what it actually sensed? Without cryptographic proof tied to onchain settlement, you're running on trust — and trust doesn't scale across 50 manufacturers, 30 jurisdictions, and thousands of machines running simultaneously.
The Fabric protocol integrates the OM1 universal operating system so robots from UBTech, AgiBot, and Fourier can share intelligence, execute onchain transactions, and verify their actions BingX — not through handshake agreements between vendors, but through ledger-locked coordination. That's the structural shift. It's not interoperability as a feature. It's interoperability as infrastructure.
Low Stakes: What Breaks Without Verifiable Compute
Think small. A solo operator running two delivery bots in a city district. No Fabric integration. Custom reward logic in a private backend. Here's what typically goes wrong:
• Ghost completions accumulate. Bot reports task done. Backend credits it. No cryptographic proof of delivery. Over 90 days, 7–12% of credited tasks are estimated phantom claims in unverified fleets.
• Skill chip conflicts. Without a unified registry, the same capability gets built three times by three developers with no coordination. Wasted compute. Divergent outputs. Zero shared quality signal.
• Reputation has no memory. A bot that failed availability checks last month looks identical to a high-performer when a new operator picks it up. No persistent identity means no trust carryover.
Every one of these failures is an alignment leak. Individually, they're annoying. At fleet scale, they're existential.
High Stakes: What Verifiable Compute Changes at Network Scale
Now scale it. Hundreds of robots. Multi-city deployments. Cross-manufacturer workflows. Public ledger coordination flips the failure modes entirely:
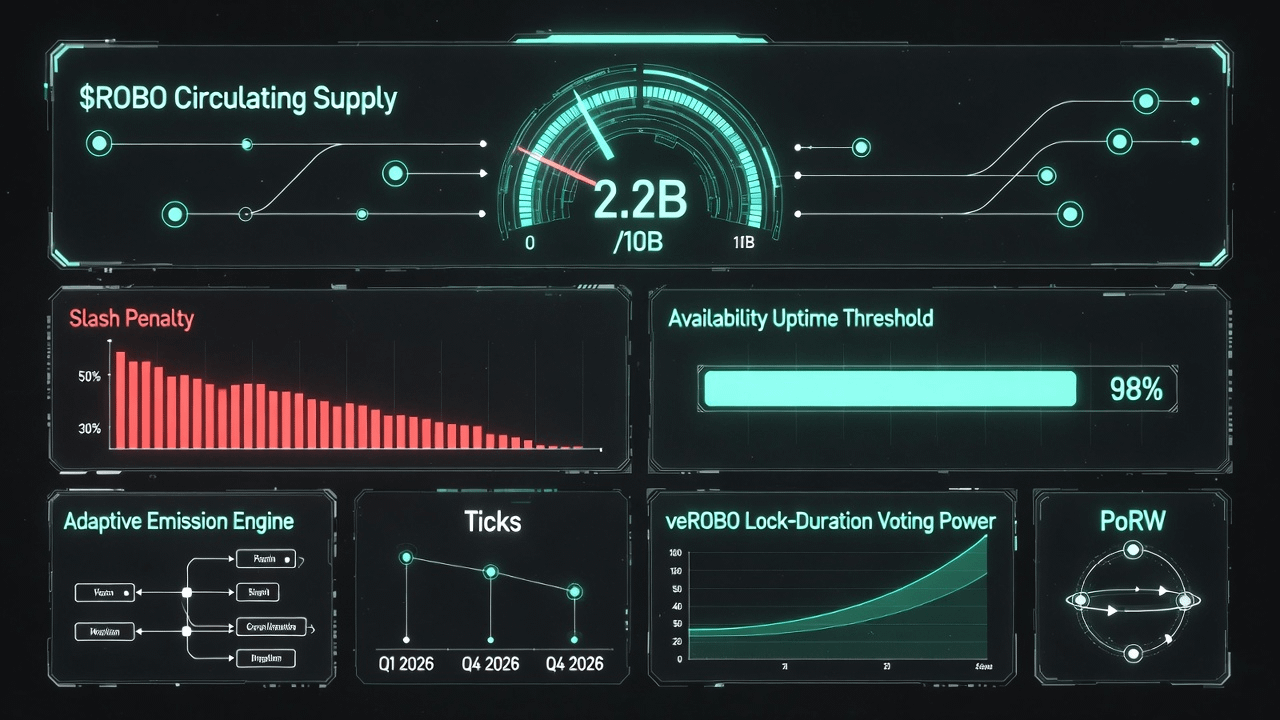
• Availability failure triggers automatically: if a robot's uptime falls below 98% over a 30-day epoch, it forfeits all emission rewards for that cycle. Fabric No human adjudication. Onchain heartbeats do the surveillance.
• Validator compensation has two components — a fixed share of protocol transaction fees for stable income, and challenge bounties for successful fraud detection, where a validator who proves fraud receives a portion of the offending robot's slashed bond. Fabric The network pays you to catch misalignment.
• Contribution scores decay over time, requiring consistent activity — making Sybil attacks through passive token holding structurally non-viable. MEXC You can't ghost the system and keep accruing.
This is agent-native infrastructure operating the way it should: every node has skin in the game, every output has a verification trail, and every fraud attempt funds its own prosecution.
The ROBO Staking Architecture — Tactics for Right Now
Here's where most forum discussions get lazy. They treat ROBO like a yield token. It's not. Unlike proof-of-stake models, ROBO rewards are earned exclusively through verified work — passive token holding generates zero emissions. MEXC
So what does active participation actually look like?
• Work bond staking (operators): Robot operators stake ROBO as collateral to register hardware and accept tasks, deterring fraud. MEXC This is mech-econ security in its most literal form. Your bond is your reputation made liquid.
• Skill development rewards (builders): Developers earn ROBO for building and deploying skill chips that robots actually use. MEXC Not for publishing them. For proving adoption. That's a material distinction.
• Governance via veROBO: Token holders lock ROBO to vote on protocol parameters, fee structures, and upgrade proposals — with longer locks providing more voting power to reward long-term alignment. MEXC If you're building on this infra, you want governance teeth. Time-lock is how you earn them.
• Revenue buybacks: A portion of all protocol revenue is used to acquire ROBO on the open market, creating persistent demand. MEXC This isn't a promise of returns. It's a structural demand floor tied to actual network usage.
With 2.2 billion ROBO currently circulating out of a 10 billion fixed supply CoinGecko, the unlock overhang is real and worth modeling. But the Adaptive Emission Engine adjusts distribution rates based on network utilization — meaning emission pressure isn't fixed. It's a function of how much verified work the network is actually doing.
The 2026 Roadmap: Q1 Through Custom L1
Fabric's 2026 roadmap outlines phased deployment: robot identity and task settlement in Q1, contribution-based incentives in Q2, multi-robot workflows in Q3, and large-scale operational refinements in Q4. Our Crypto Talk
Q2 is the one to watch closely. The team plans to introduce contribution-based incentives tied to verified task execution and data submission — meaning rewards will be distributed for real, onchain robotic work, not passive holding. CoinMarketCap That activation event is the first true stress test of the Proof of Robotic Work mechanism at meaningful scale. If the incentive models verify physical-world work accurately, it directly feeds the machine learning models and economic engine downstream.
Beyond 2026, the protocol targets a machine-native Fabric L1 blockchain, capturing economic value directly from robot activity at the infrastructure level, alongside a Robot Skill App Store open to developers worldwide. MEXC
That L1 migration isn't a rebrand — it's when ROBO becomes native gas. Settlement token, governance asset, and infrastructure fuel all in one. The economics compress significantly at that transition point.
The Hacker's Angle: Prototype Now, Before Q2 Locks In
If you're a builder, the modular scaffolding available right now on Base is the proving ground. Skill chips are the entry point — compact software files that add specific capabilities to robots, similar to installing apps on a smartphone. MEXC Build one. Deploy it. See what the contribution scoring engine does with it. That's not just a product experiment — it's how you accrue reputation before the Q2 incentive mechanisms launch and the competition for verified contribution slots gets real.
Three questions I'd throw at the forum:
1 How do you design a skill chip scoring system that's resistant to contribution gaming at scale — without centralizing the adjudication layer?
2 When the Fabric L1 lands, what happens to projects built on Base that didn't migrate their identity infrastructure?
3 If validator challenge bounties scale with slashed amounts — does that inadvertently incentivize validators to seed fraud rather than merely detect it?
Prototype the Fabric tools. Break things in testnet before the mainnet stakes are real.