Fabric didn’t blink.
The robot completed the task.
Grip stable. Path clean. No collision risk. If you were standing beside it, you’d call it flawless.
The ledger disagreed.
No wallet funding.
No fee paid.
No identity update.
So as far as the network was concerned —
nothing happened.
I’ve seen mechanical failures before. This wasn’t one. Torque curves were clean. Stabilization held. Sensors didn’t spike. The silence wasn’t physical.
It was economic.
And economic silence doesn’t throw alarms. It just refuses to propagate.
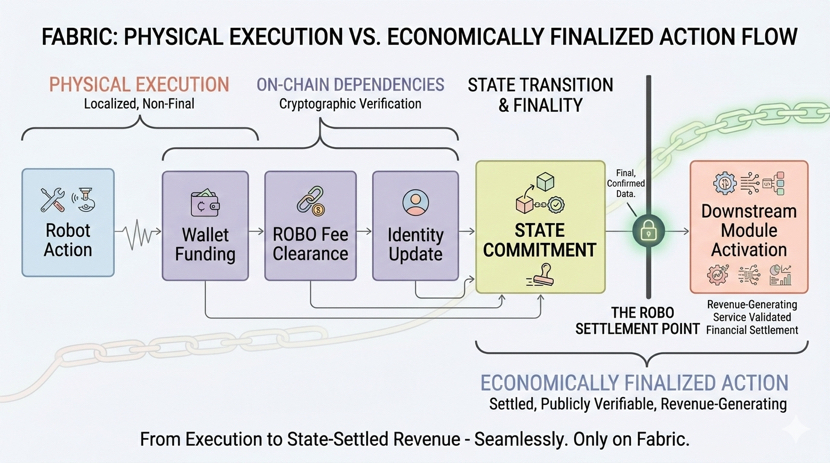
I funded the wallet mid-shift.
ROBO moved.
Fee cleared.
Identity instantiated.
State committed.
Same motion. Same outcome.
Different reality.
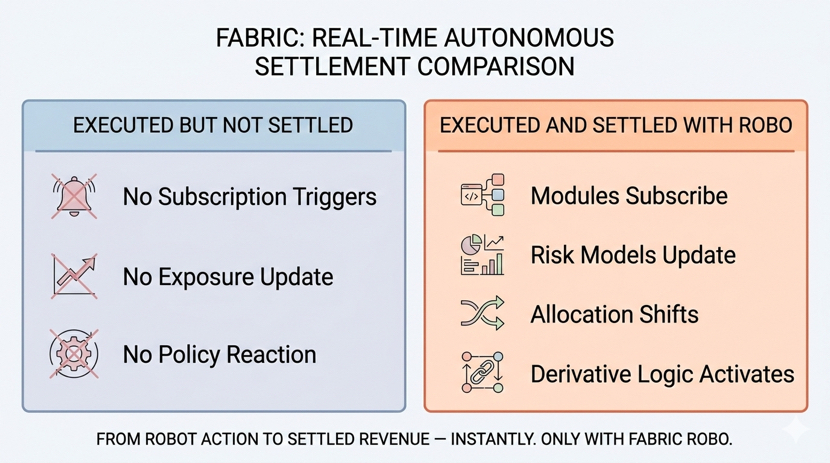
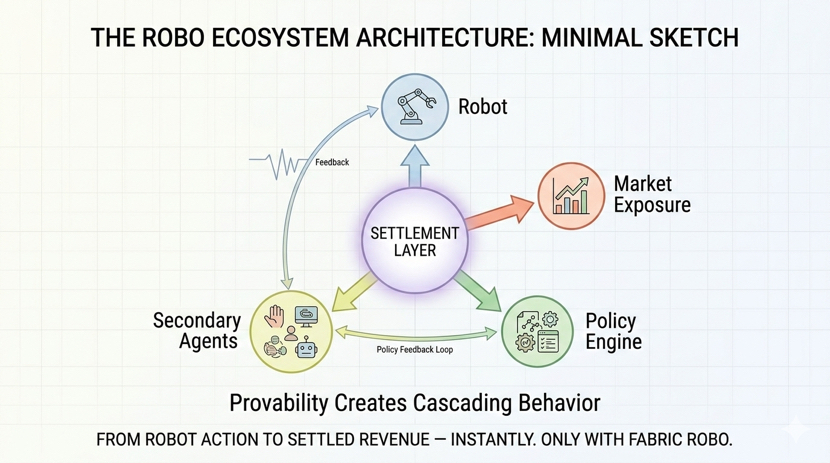
The moment settlement cleared, other systems reacted. Policy modules subscribed. Allocation engines adjusted. Exposure recalculated. Nothing about the arm changed.
Everything about its footprint did.
That shift is violent once you notice it.
Robots don’t open bank accounts.
They don’t carry passports.
They carry wallets.
And if the fee isn’t paid in ROBO, the action doesn’t exist outside the machine’s body.
I ran it again without settlement.
Perfect execution.
Zero recognition.
We were trained to believe reality is what we see. In Fabric’s environment, reality is what gets finalized. No commit means no memory. No memory means no secondary behavior.
The machine moves.
The system refuses to remember.
Milliseconds stretched.
I hovered over the config longer than I should have.
Do I optimize motion?
Or optimize provability?
You can’t always maximize both.
Intelligence without settlement is performance art. Movement without accounting is rehearsal. The moment ROBO clears, the action stops being motion and becomes infrastructure.
And infrastructure is what markets price.
Fabric doesn’t freeze machines.
It freezes what the network is allowed to trust.
If a robot performs flawlessly but never settles —
did it actually work
#ROBO @Fabric Foundation $ROBO
