
Earlier I was looking at how robotic tasks move through a shared network.
At first everything looked simple. Instructions moved quickly. Machines responded almost instantly.
But underneath that smooth surface, the system wasn’t operating as one large structure.
Different layers were handling different responsibilities.
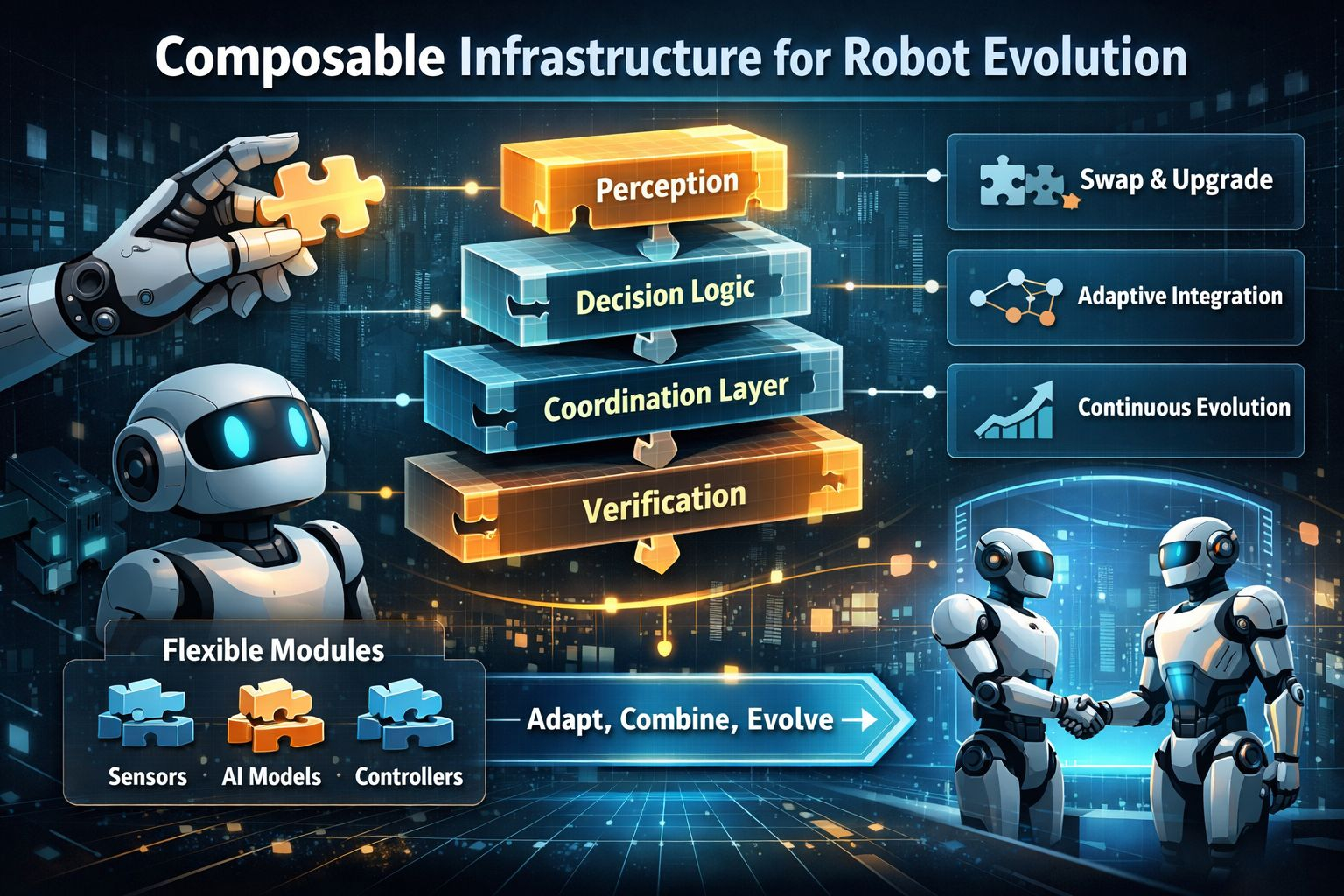
One layer coordinated data between machines. Another handled computation. A verification layer confirmed execution before actions moved forward.
Each piece worked independently.
That moment made something clear.
Large robotic networks don’t fail because machines lack power. They fail when the infrastructure becomes too rigid.
Monolithic systems concentrate complexity.
Fabric approaches this differently through modular protocol design.
Coordination, computation, verification, and governance exist as separate building blocks. Each module can evolve without forcing the entire system to change.
That flexibility matters as autonomous machines begin to collaborate at scale.
New capabilities can plug into the network. Governance rules can adapt. Developers can improve individual modules without disrupting everything around them.
Because systems that scale successfully are rarely monolithic.
They are modular networks designed to evolve with the machines they coordinate.
@Fabric Foundation #ROBO $ROBO #robo
