I have spent a lot of time examining how robotics infrastructure actually functions in practice, and one pattern continues to emerge. Most robotic systems operate under centralized platforms that handle coordination, verification, and settlement. The robots themselves may be advanced, but the authority over their activity typically resides with a single operator. In controlled environments, this model works well. It is efficient, predictable, and relatively easy to manage. Still, the more I explore Robo Coin and the infrastructure built around Fabric Protocol, the more it feels like an attempt to rethink that structure—not by replacing robots, but by changing how their work is verified and rewarded.
I understand why centralized robotics platforms initially became dominant. When one company controls the robots, the software stack, and the data pipeline, coordination becomes straightforward. A robot completes a task, the platform logs the activity, and the operator settles the outcome internally. Everything moves quickly because fewer parties are involved, and there are fewer rules to negotiate. From an operational perspective, that simplicity is hard to argue against.
However, I keep noticing that this simplicity heavily depends on trusting the platform itself.
The moment robotic work crosses organizational boundaries, complexities begin to arise. I think about logistics hubs where robots owned by different vendors operate within the same warehouse. Or municipal systems where autonomous inspection machines from multiple contractors maintain public infrastructure. In those environments, relying on a single centralized platform to serve as the source of truth can create tension. Whoever controls the platform effectively controls the narrative of what occurred.

That is the point where Robo Coin and Fabric Protocol start to make more sense to me.
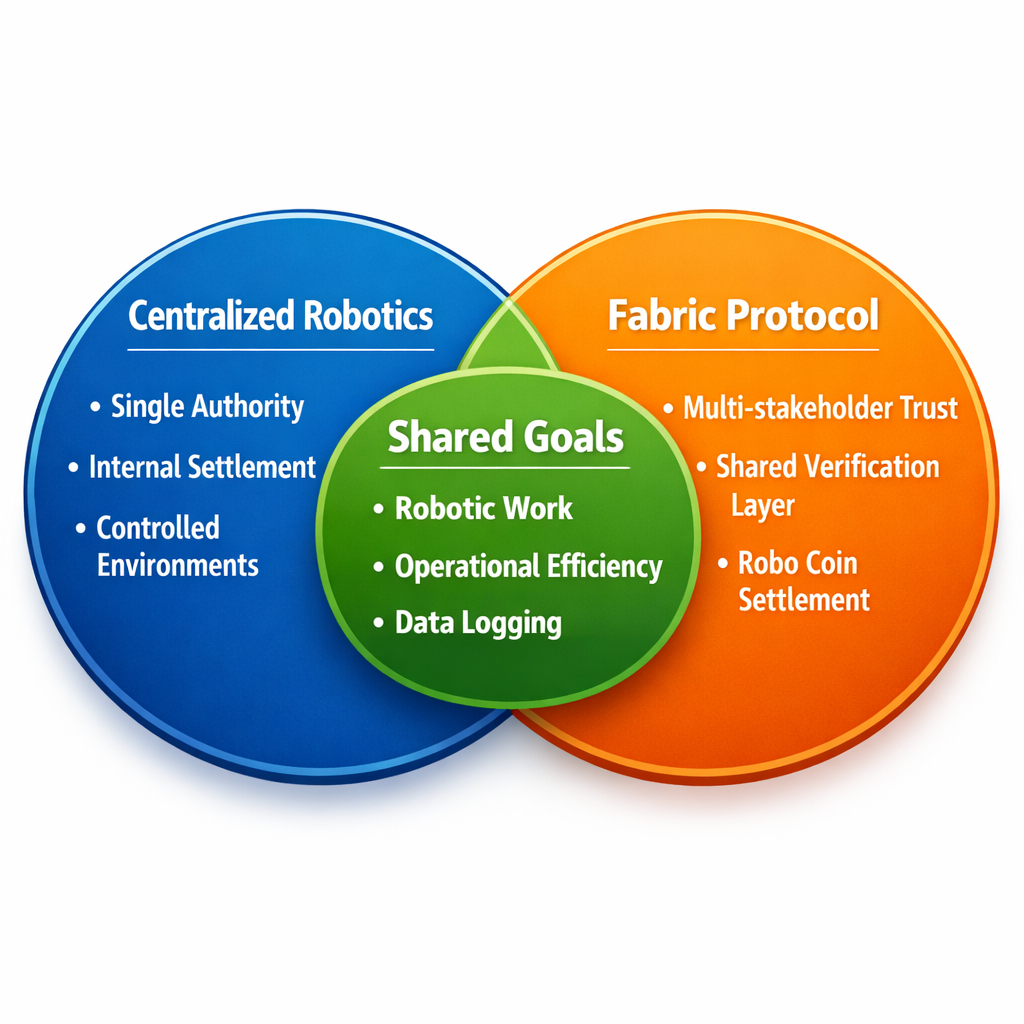
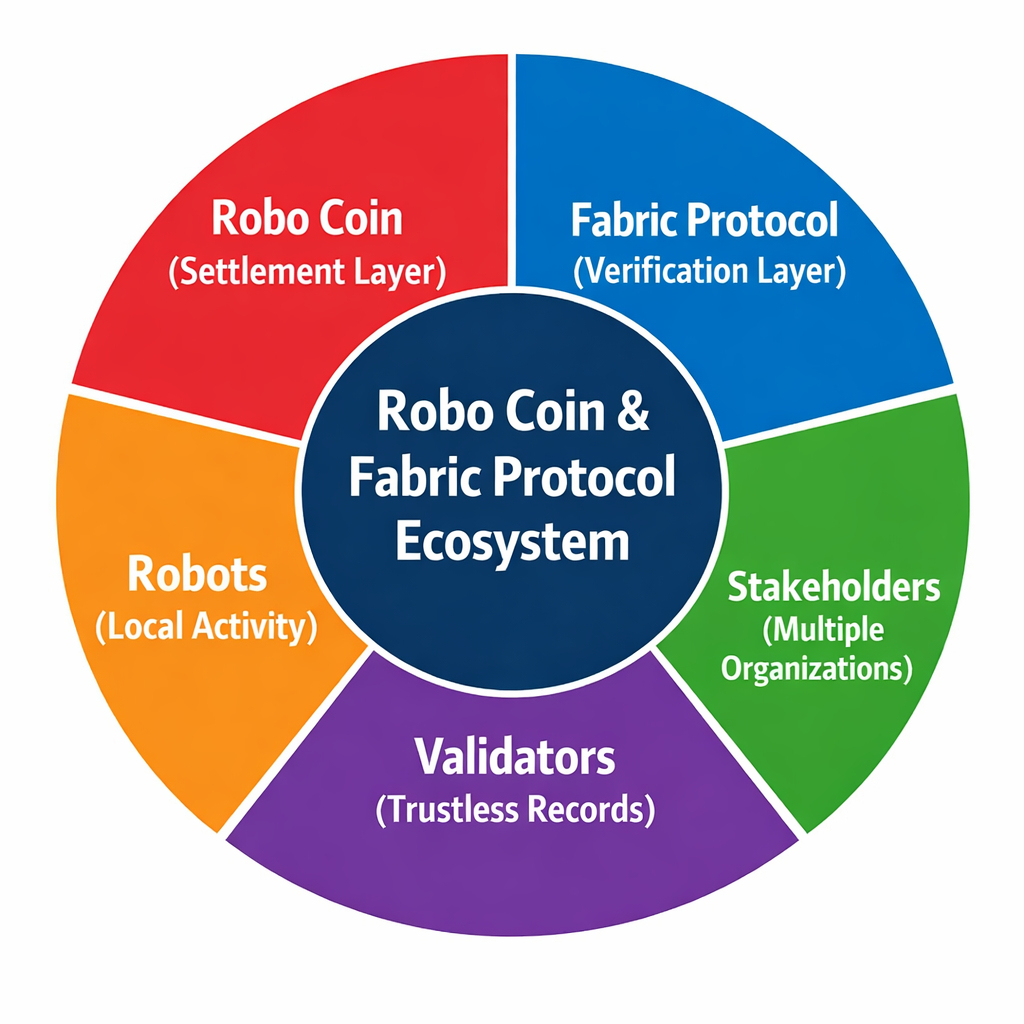
Instead of relying on one authority to validate robotic activity, Fabric introduces a verification layer that sits above the machines themselves. The robots still perform tasks locally, just as they always have. But their actions become claims that can be verified by the network. Once those claims are validated, settlement can occur through Robo Coin. At least in theory, that structure allows robotic work to be recognized across multiple stakeholders without forcing everyone to trust the same centralized operator.
From my perspective, the difference is subtle but significant. Centralized robotics focuses on optimizing coordination within a single organization. Decentralized infrastructure seeks to coordinate activity across organizations that may not fully trust each other.
Even so, I am cautious about calling this a clear advantage.
Centralized systems succeed largely because they reduce complexity. Introducing a decentralized verification layer inevitably adds new components—validators, consensus mechanisms, and incentive structures. Each of these elements must work reliably for the system to maintain credibility. If verification becomes slow, expensive, or unclear, operators may prefer the reliability of centralized oversight.
I also consider incentives carefully. Robo Coin functions as a settlement layer for robotic work, which makes the definition of “completed work” extremely important. If verification rules are too lax, the system risks rewarding inaccurate or exaggerated claims. Conversely, if the rules are too strict, legitimate work might fail verification and go unpaid. In decentralized environments where robots operate under different conditions, maintaining that balance could become a constant challenge.
Nevertheless, what holds my attention is that Robo Coin and Fabric Protocol do not attempt to control the robots themselves. They focus on verification and settlement after the work has been performed. This separation reminds me of how financial infrastructure operates. Banks do not control what businesses do daily; they process the economic outcomes of those activities. Fabric seems to apply a similar concept to robotic work.
In situations where robots operate beyond a single company’s control, this shared verification layer could improve coordination. Instead of relying solely on contracts or centralized records, participants could reference a system that confirms what machines actually did.
However, I do not assume that this outcome is inevitable.
Centralized robotics platforms will likely continue to dominate environments where one organization owns both the machines and the infrastructure. Decentralized alternatives only become compelling when collaboration across multiple operators becomes unavoidable. Whether this advantage emerges will depend less on ideology and more on whether decentralized verification proves feasible in real, unpredictable environments.
For now, Robo Coin and Fabric Protocol seem less like replacements for centralized robotics and more like experiments in expanding how robotic work can be coordinated. The real question, at least from my viewpoint, is whether operators will eventually trust decentralized records of machine activity as much as they trust the platforms they already rely on.