I began respecting partial completion the night a task showed success everywhere that usually matters. The dashboard marked it finished. The logs looked clean. Metrics were stable. Still, we paused the next step and held it overnight. Not because something broke, but because nobody could answer one simple question clearly. If a dispute arrives late, what exactly did success mean.
Nothing failed. No exploit. Just a quiet admission from the workflow.
Completion was not binary.
That is the frame I use when I think about ROBO. Not whether agents can execute. Not whether verification works in principle. The sharper question is this. When ROBO becomes a live work surface, does it treat partial completion as a first class state or as a visual progress bar.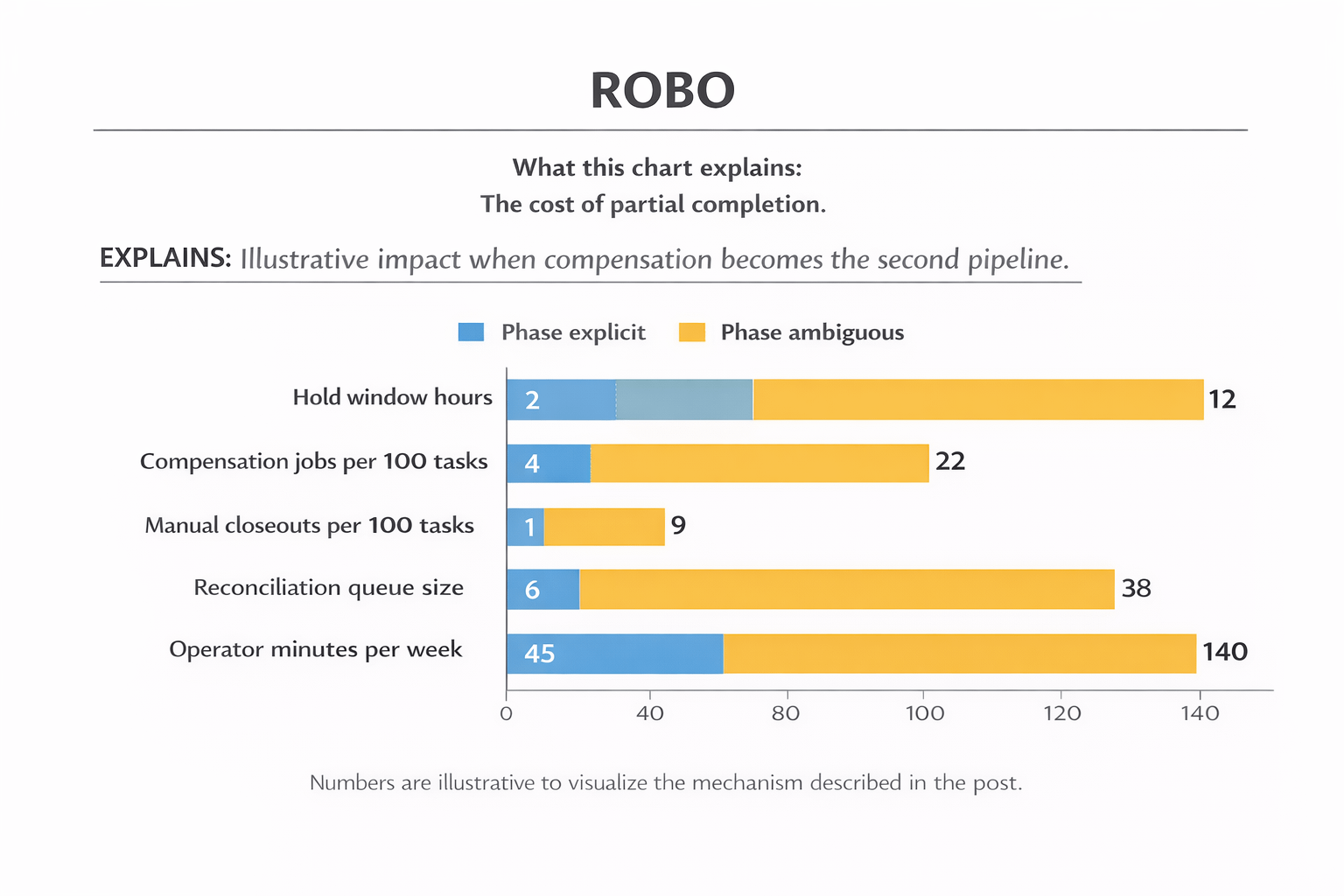
It sounds like a minor product detail. In practice, it decides whether you built automation or hired operators with better tooling.
Blockchains get to treat confirmation as atomic. A transaction is final or it is not. Coordinated work systems do not have that luxury. Real tasks unfold in phases. Assignment. Execution. Evidence binding. Claim evaluation. Acceptance. Payment. Closure. Under load those phases drift. The system starts emitting mid flight states as normal behavior.
Those states are not rare. They are the steady state of scale.
And they are where cost begins to accumulate.
The story people prefer is linear. A task is posted. An operator executes. Evidence is submitted. Claims are verified. Payment is released. The next task triggers.
The story becomes complicated in one place.
Which intermediate states are actionable, and which are suspense.
Suspense creates queues.
Imagine a task is mostly executed. Some claims are verified cleanly. Others remain pending because they require deeper validation. The interface shows progress. The operator assumes it is safe to proceed. Then a late dispute lands. Or a rule update shifts interpretation. Or an evidence gap appears.
Now the system must answer something uncomfortable.
What do we do with work that already happened.
Full reversal is simple when everything is reversible. Partial completion means full reversal is rarely possible. You need selective unwind. And selective unwind requires explicit semantics.
What qualifies as partial. What qualifies as committed. What remains reversible. What becomes payable. What becomes slashable.
If these boundaries are not defined at protocol level, the application layer will invent them. I have seen this pattern repeatedly.
First comes a hold window. Wait before advancing.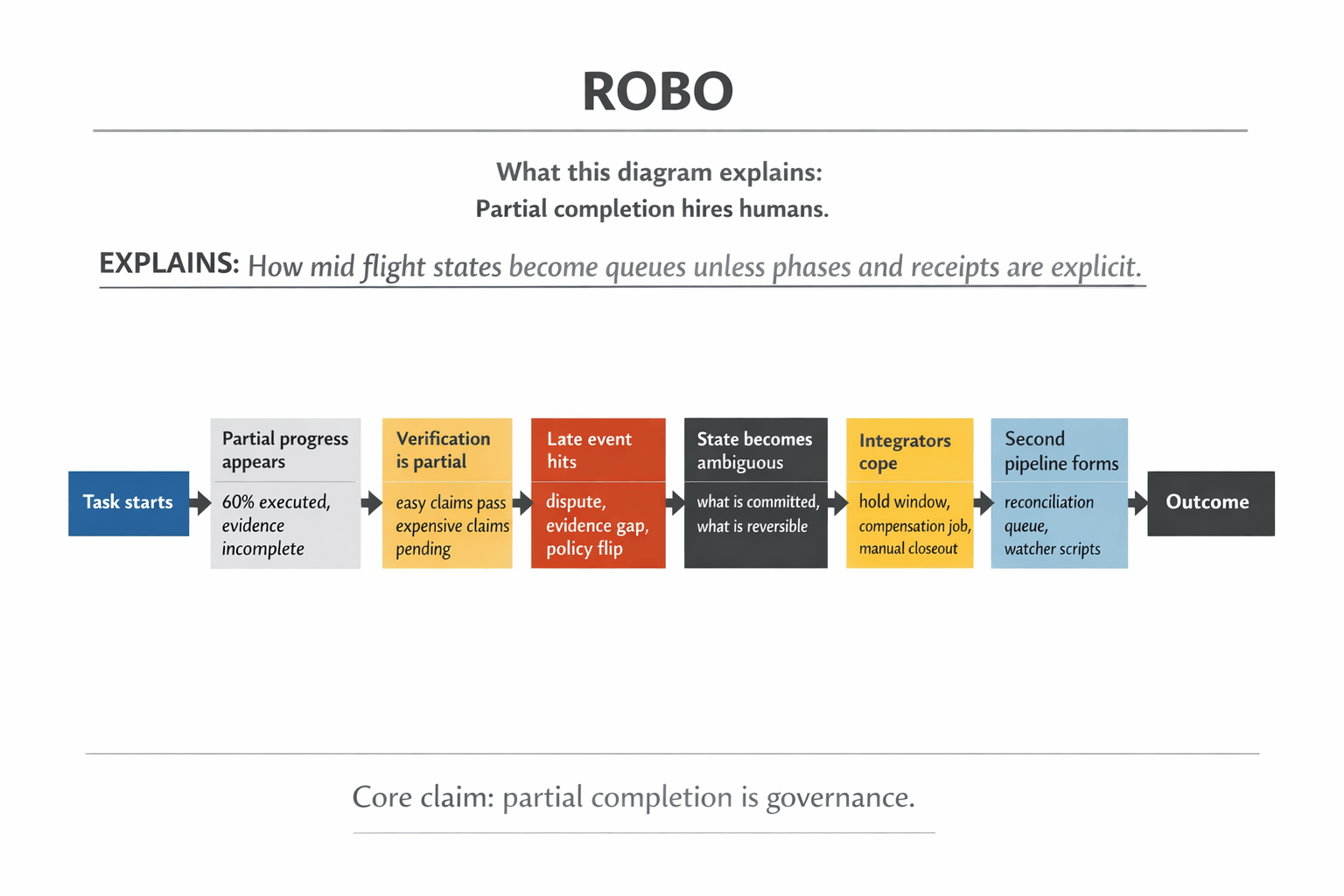
Then a compensation routine. If a later phase fails, trigger a cleanup task.
Then a manual review checklist. Escalate ambiguous cases.
Then a reconciliation queue that scans for mid flight tasks and tries to settle them retroactively.
By the second week that compensation flow is no longer an exception. It is a parallel pipeline.
Nobody calls this architectural drift. It is labeled reliability work.
But what actually happened is simple. Partial completion was treated as interface feedback instead of a formal state machine. Interface abstractions eventually become operational debt. And operational debt rarely disappears once partners integrate around it.
This is why partial completion feels like a sharper test for ROBO than headline features.
ROBO coordinates execution. Execution is phased. Phases generate intermediate states.
The real question is not whether partial completion occurs. It will.
The question is whether ROBO makes those states explicit enough that integrators do not build their own truth ladders.
A work surface that wants to stay single pass needs two structural properties.
First, a defined phase model. The protocol must specify which phase a task occupies and which transitions are permitted next.
Second, replayable receipts at each phase boundary. Observers should be able to reconstruct what evidence was attached, what policy version applied, what was committed at transition, and what compensating action is valid if that phase is later reversed.
This layer feels procedural. It can feel heavy.
But if it is skipped, speed does not increase. Ambiguity increases.
Ambiguity trains wait and recheck into default behavior. And once wait and recheck becomes the safe path, autonomy has already degraded. It just looks clean on the surface.
There is a tradeoff. If ROBO enforces strong phase boundaries, some optimistic workflows will feel constrained. Builders may experience friction. Debugging may feel stricter because mid flight states are governed by rules rather than informal expectations.
That rigidity may frustrate people.
But the alternative is not flexibility. The alternative is hidden supervision.
You will still have phases. You will still have mid execution ambiguity. The only difference is that resolution will move into private runbooks and escalation threads instead of protocol logic.
This is where $ROBO becomes relevant, and I mention it late intentionally.
A token does not eliminate partial states. It can, however, shape incentives around them. Participants can be rewarded for producing complete phase receipts. Validators can be compensated for resolving disputes early in the correct phase rather than after downstream effects propagate. Operators can be penalized for leaving work in ambiguous half committed states that require manual closure.
If $ROBO is not aligned with that operational discipline, costs will surface elsewhere. Off chain arbitration agreements. Insurance clauses. Integrator side scripts that quietly become the real control plane.
So I do not end with a verdict. I end with practical diagnostics.
When ROBO experiences load, do workflows remain single pass or does compensation become routine.
Do intermediate states resolve mechanically, or do manual closeouts accumulate.
Do integrators gradually remove reconciliation scripts, or do those scripts multiply.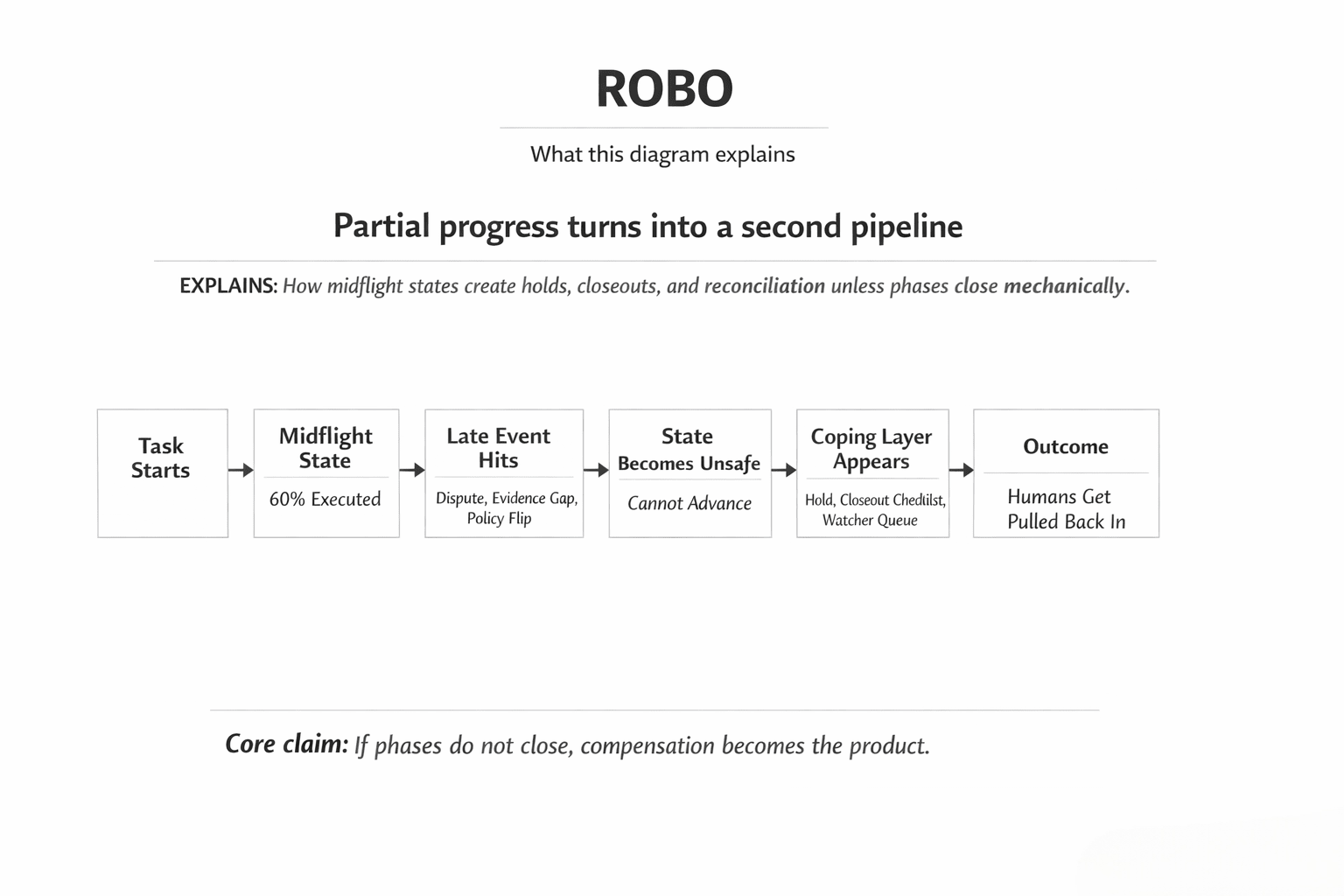
When a task is largely complete but contested, does ROBO specify the exact meaning of that state and the deterministic next transition without human mediation.
If partial completion becomes legible, autonomy remains economical.
If it does not, the network can still function.
It will simply function with an invisible operations team attached.
#Robo #robo $ROBO @Fabric Foundation
