If $ROBO built a cross-chain “Autonomous Capital Router” where robot fleets reallocate themselves based on yield signals, would labor mobility become algorithmic capital flow?
Last week I opened a staking dashboard I use occasionally. The APY number flickered for half a second before settling 0.8% lower. No notification. No explanation. Just a quiet adjustment. Somewhere in the backend, liquidity had shifted. Maybe a validator rotated. Maybe emissions recalibrated. I didn’t approve anything. The interface refreshed, and capital had already moved.
It wasn’t a bug. It was working as designed.
But that moment felt slightly broken. Not because I lost yield. Because I wasn’t the decision-maker. The system optimized itself around me. Modern digital infrastructure increasingly behaves this way: silent repricing, invisible routing, backend arbitration. Platforms rebalance in milliseconds. Contracts are static, but allocation is fluid. Power sits with whoever controls the routing logic.
That’s the structural misalignment. Labor is rigid; capital is fluid.
Workers sign contracts. Robots get deployed to fixed facilities. Capital, meanwhile, glides across chains chasing yield, arbitrage spreads, emissions. The asymmetry isn’t technological — it’s architectural. Our economic systems treat labor as location-bound and capital as signal-bound. One moves slowly through paperwork. The other moves instantly through code.
Here’s the mental model that reframed it for me:
Think of capital as water pressure and labor as plumbing.
Water (capital) naturally flows toward lower resistance and higher gradient. Plumbing (labor infrastructure) is fixed, bolted into walls. When pressure changes, water reroutes instantly. Pipes don’t. They crack.
We’ve built a world where capital behaves like a fluid market signal, but labor remains bolted to geography and fixed deployment cycles. Automation hasn’t solved this — it’s amplified it. Robot fleets in warehouses or delivery networks are often deployed based on quarterly forecasts, not real-time yield curves.
Now consider blockchain ecosystems.
On Ethereum, capital moves with composability. Yield farms plug into lending markets, which plug into derivatives. Liquidity migrates with contract calls.
On Solana, speed compresses reaction time. Arbitrage bots rebalance before retail dashboards refresh.
On Avalanche, subnets create isolated economic zones where incentives can be fine-tuned per application.
In all three, capital routing is native. Labor routing is not.
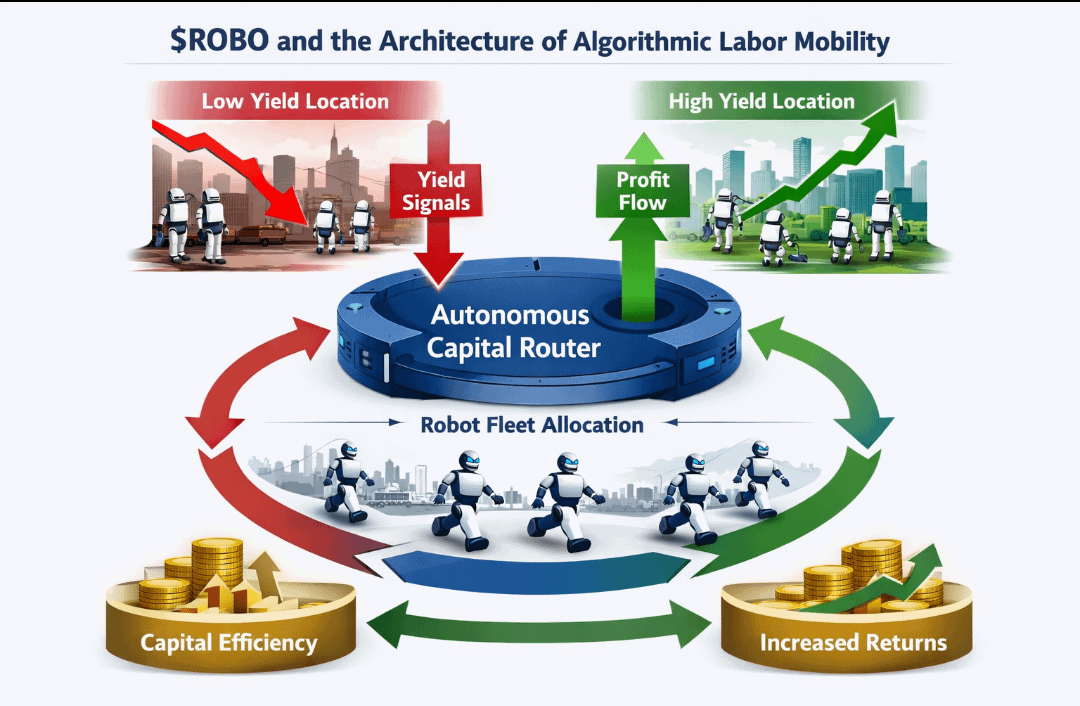
That’s where the concept of an Autonomous Capital Router becomes structurally interesting.
If ROBO were to build a cross-chain router that interprets yield signals not just for tokens but for robot fleets, labor mobility could begin to behave like capital flow. Not metaphorically — mechanically.
Imagine a system where robotic assets — warehouse bots, delivery drones, industrial arms — are tokenized as yield-generating units. Each fleet exposes performance data: utilization rate, maintenance cost, revenue per hour. Smart contracts aggregate that data and compare it against cross-chain yield signals — DeFi rates, staking returns, demand forecasts from decentralized marketplaces.
The router reallocates deployment based on comparative yield.
Not by selling robots. By redirecting their operational contracts.
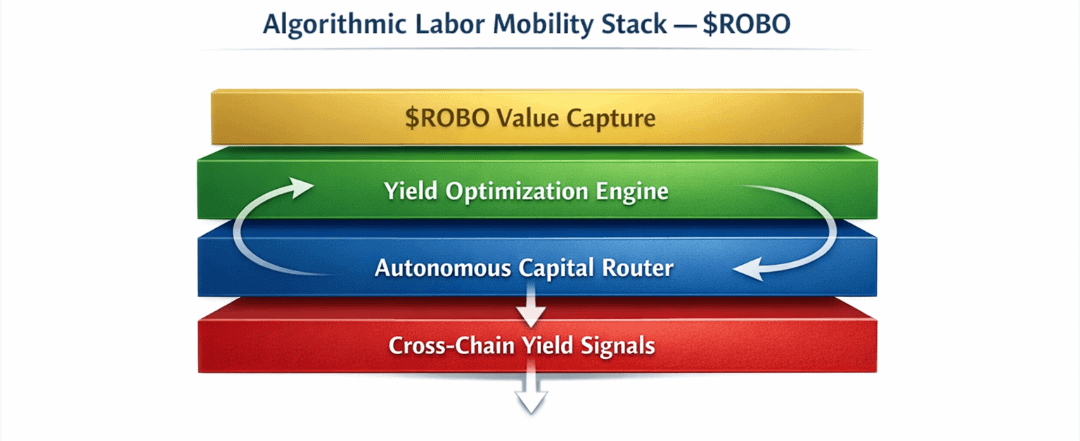
Architecturally, this requires three layers:
1. Data Integrity Layer
Robotic fleets publish verifiable telemetry: uptime, output, energy consumption. Oracles aggregate and normalize this data across chains. Without credible data, yield signals are noise.
2. Execution Layer
Cross-chain messaging protocols coordinate reallocation instructions. If yield in Logistics Zone A exceeds Manufacturing Zone B, contracts update deployment priority. Robots receive updated task queues via secure gateways.
3. Incentive Layer (MIRA)
Here the token becomes structural. MIRA could function as staking collateral for accurate telemetry submission. Fleet operators stake MIRA to guarantee truthful data; slashing occurs if audits reveal discrepancies. Additionally, routers might require MIRA fees to process reallocation, creating demand tied directly to mobility events.
Value capture then aligns with activity. The more frequently labor reallocates to chase yield, the more routing fees accrue. Unlike static staking models, token utility derives from movement.
The incentive loop looks like this:
Fleet Data → Yield Comparison → Reallocation Event → MIRA Fee + Staking Adjustment → Updated Performance Data
Each loop refines allocation efficiency.
Visual Idea (Source-Based Diagram):
A flow diagram titled “From Yield Signal to Labor Reallocation.”
Left column: Cross-chain yield feeds (ETH staking rate, SOL DeFi APY, AVAX subnet demand index).
Center: Autonomous Capital Router (data normalization + decision engine).
Right column: Robot Fleet Nodes (Warehouse A, Port B, Factory C).
Arrows show telemetry flowing back into the router, forming a closed loop.
This visual matters because it demonstrates that labor mobility becomes a programmable feedback system, not a managerial decision.
Second-order effects get interesting.
Developers would begin designing applications assuming robotic labor is elastic. Instead of building static marketplaces, they’d build demand curves that attract fleets algorithmically. Infrastructure becomes signal-driven.
Users — or enterprises — would compete on yield attractiveness. If a logistics hub wants more robotic capacity, it must generate better on-chain revenue signals. Labor supply responds like liquidity mining, but tied to physical output.
But risks are non-trivial.
First, over-optimization. If fleets constantly chase marginal yield differences, operational stability suffers. Real-world deployment has switching costs — transport, recalibration, regulatory compliance. Excessive fluidity could degrade reliability.
Second, data manipulation. If yield signals determine labor flow, actors may inflate telemetry to attract fleets. The staking and slashing mechanism must be robust enough to deter fraud, or the router becomes a magnet for false demand.
Third, concentration risk. If routing logic is governed by a small validator set, labor mobility becomes programmable — but politically centralized. Governance design matters. $MIRA holders influencing routing parameters could unintentionally bias entire industrial sectors.
There’s also a behavioral shift.
If labor becomes algorithmically mobile, long-term employment contracts weaken. Fleets behave like liquidity pools, not human teams. Efficiency rises. Stability declines. The social contract around work transforms from tenure to throughput.
And maybe that’s the uncomfortable point.
We already allow capital to move frictionlessly across borders, chains, and protocols. Labor — especially automated labor — remains artificially fixed because our infrastructure hasn’t caught up with our signal systems.
An Autonomous Capital Router doesn’t “liberate” labor. It subjects it to the same ruthless efficiency we’ve normalized in finance.
The deeper question isn’t whether robot fleets can reallocate based on yield. Technically, they can. Cross-chain messaging exists. Telemetry standards are emerging. Incentive tokens can coordinate behavior.
The real issue is architectural symmetry.
If capital flows algorithmically while labor remains static, power concentrates with whoever controls allocation. If labor also flows algorithmically, power shifts toward whoever controls signals.
$ROBO’s potential isn’t about robotics hype. It’s about aligning two systems that have operated under different mobility rules. When labor mobility mirrors capital flow, the economy stops distinguishing between the two.
And once that distinction dissolves, productivity is no longer about who owns assets or who signs contracts. It’s about who designs the routing logic.
The future of work may not be remote or automated.
It may simply be routed.$ROBO #ROBO @Fabric Foundation