L'industria della robotica si sta avvicinando a un punto decisionale architettonico critico che determinerà se i robot di uso generale diventeranno infrastrutture che servono il più ampio interesse pubblico o se diventeranno sistemi proprietari controllati da un numero ristretto di aziende che ottimizzano per obiettivi che potrebbero non allinearsi con la sicurezza, la trasparenza o l'evoluzione collaborativa. La maggior parte delle piattaforme robotiche costruite oggi seguono lo stesso modello di infrastruttura chiusa che ha dominato le onde tecnologiche precedenti, dove un'azienda costruisce un stack proprietario, attrae utenti attraverso funzionalità e marketing, e poi sfrutta il lock-in risultante per estrarre valore da un ecosistema che ha alternative limitate. @Fabric Foundation è stato progettato fin dall'inizio per dimostrare che un modello diverso è possibile e, cosa più importante, che il modello diverso è l'unico modello che rende la robotica di uso generale sicura e sostenibile su scala che conta.
Il problema con l'infrastruttura chiusa nella robotica non riguarda principalmente le preferenze del modello di business o gli impegni filosofici verso l'apertura per il suo stesso bene. Il problema è strutturale e diventa visibile quando esamini cosa succede quando i robot si spostano da ambienti controllati dove il loro comportamento può essere specificato in modo rigoroso a ambienti di uso generale dove devono prendere decisioni in contesti che non erano stati previsti dai loro progettisti. In un sistema chiuso, quando un robot incontra un caso limite o una preoccupazione per la sicurezza che non è stata affrontata nel design originale, l'unica entità che può rispondere è l'azienda che controlla l'infrastruttura, e la risposta di quell'azienda è vincolata dai propri incentivi, risorse e priorità piuttosto che da ciò che sarebbe ottimale per l'ecosistema nel suo insieme.
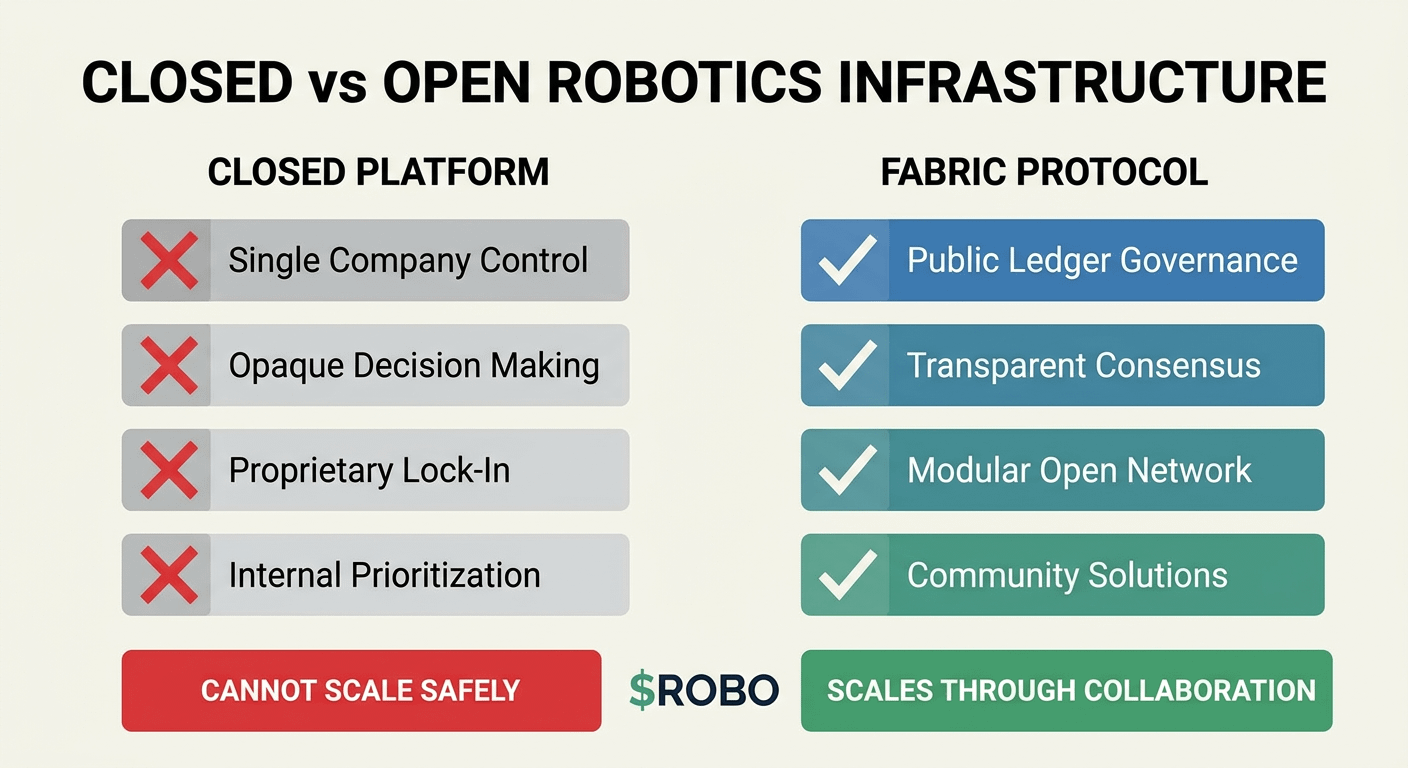
Considera cosa significa questo nella pratica per qualcosa di così basilare come gli aggiornamenti di sicurezza. Quando un problema di sicurezza viene scoperto in una piattaforma robotica chiusa, la tempistica per l'implementazione di una correzione è determinata dal processo di prioritizzazione interna dell'azienda, che bilancia le preoccupazioni per la sicurezza con altri obiettivi aziendali come lo sviluppo di funzionalità, l'acquisizione di clienti e la gestione dei costi. Se l'azienda decide che il problema di sicurezza influisce solo su un numero limitato di implementazioni o che affrontarlo richiederebbe risorse ingegneristiche significative che potrebbero essere impiegate altrove, la correzione può essere ritardata o depotenziata in modi che non accadrebbero in un sistema aperto dove la comunità più ampia può contribuire a soluzioni e dove le decisioni di governance vengono prese in modo trasparente con l'input di tutte le parti interessate.
$ROBO cambia questa dinamica coordinando lo sviluppo e la governance dei robot attraverso un libro mastro pubblico dove dati, calcolo e regolazione sono visibili a tutta la rete piuttosto che essere controllati da un'unica entità. Quando viene identificato un problema di sicurezza, qualsiasi partecipante nella rete può proporre una soluzione, qualsiasi partecipante può verificare che la soluzione funzioni correttamente, e il dispiegamento della soluzione avviene attraverso meccanismi di consenso trasparenti piuttosto che attraverso processi interni opachi in un'azienda che potrebbe avere incentivi conflittuali. Questo non significa che tutti i problemi di sicurezza vengano risolti istantaneamente o che la governance diventi priva di attriti, ma significa che la struttura degli incentivi è allineata con la sicurezza e il miglioramento collaborativo piuttosto che con la protezione dei vantaggi proprietari.
L'infrastruttura nativa agli agenti che @Fabric Foundation ha costruito riconosce che i robot non sono solo applicazioni software che possono essere gestite utilizzando gli stessi strumenti e assunzioni che funzionano per i servizi web o le app mobili. I robot sono agenti fisici che interagiscono con il mondo reale, e l'infrastruttura che li supporta deve tenere conto dei requisiti di performance in tempo reale, delle garanzie di verifica che garantiscono un comportamento sicuro anche quando la connettività di rete è intermittente, e dei meccanismi di coordinamento che funzionano quando gli agenti sono distribuiti nello spazio geografico e devono prendere decisioni basate su informazioni incomplete su ciò che stanno facendo altri agenti.
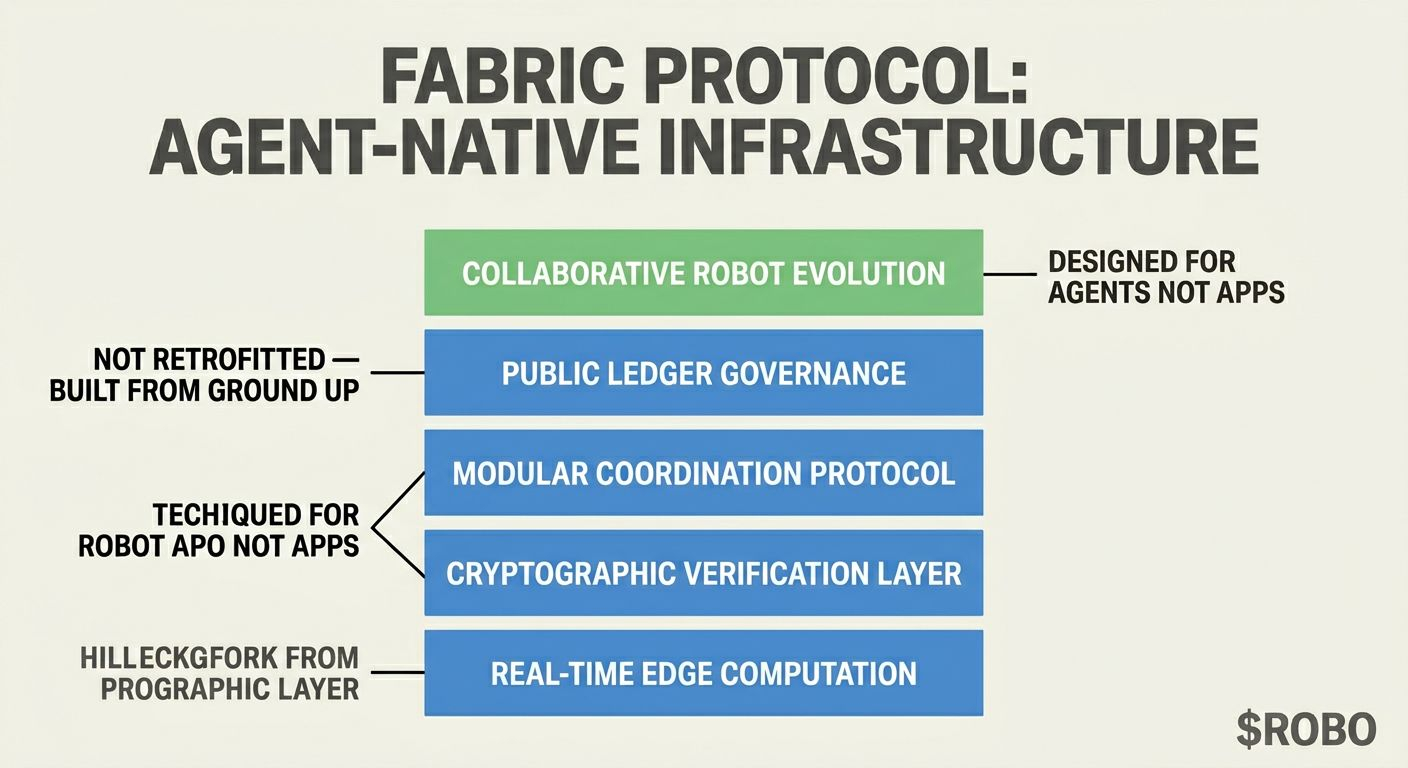
Costruire questa infrastruttura su sistemi cloud legacy progettati per casi d'uso diversi crea discrepanze architettoniche che si manifestano come problemi di latenza quando sono necessarie decisioni in tempo reale, come problemi di verifica quando devono essere generate e validate prove crittografiche ai bordi piuttosto che in un data center centralizzato, e come problemi di coordinamento quando gli agenti devono raggiungere un consenso su uno stato condiviso senza fare affidamento su un'autorità centrale che potrebbe diventare un collo di bottiglia o un singolo punto di fallimento. L'infrastruttura nativa agli agenti è progettata fin dall'inizio per supportare questi requisiti piuttosto che cercare di adattarli a sistemi che hanno fatto assunzioni fondamentali diverse.
L'approccio di coordinamento modulare che implementa Fabric Protocol è particolarmente importante per abilitare il tipo di evoluzione collaborativa che la robotica di uso generale richiede man mano che la comprensione della sicurezza e delle capacità migliora nel tempo. Nei sistemi chiusi, la modularità è limitata a quali punti di estensione l'azienda controllante ha scelto di esporre, e quei punti di estensione sono tipicamente progettati per proteggere i vantaggi proprietari core dell'azienda piuttosto che massimizzare la capacità dell'ecosistema di innovare. In una rete aperta coordinata attraverso un libro mastro pubblico, la modularità è imposta a livello di protocollo, il che significa che qualsiasi componente può essere sostituito o aggiornato purché mantenga la compatibilità con le interfacce su cui dipendono altri componenti, e la decisione su se adottare un nuovo componente è presa dalla rete attraverso una governance trasparente piuttosto che da un'azienda attraverso una prioritizzazione interna.
Questa differenza architettonica diventa sempre più importante man mano che la complessità e le capacità dei sistemi robotici aumentano, perché una maggiore complessità significa una maggiore area di superficie per problemi di sicurezza, colli di bottiglia nelle performance e fallimenti di coordinamento, e l'unico modo sostenibile per gestire quella complessità su larga scala è attraverso un sistema in cui l'intera rete può contribuire a soluzioni piuttosto che fare affidamento sulle risorse ingegneristiche di un'unica azienda per affrontare ogni problema. Le aziende che costruiscono piattaforme robotiche chiuse oggi scopriranno alla fine che non possono scalare i loro team interni abbastanza velocemente per tenere il passo con il tasso al quale emergono nuovi problemi di sicurezza e sfide di coordinamento nelle implementazioni di uso generale, e quando scopriranno questa limitazione, il costo della migrazione verso un'architettura aperta sarà insostenibilmente alto a causa delle dinamiche di lock-in che hanno creato.
Ciò che differenzia @Fabric Foundation da altri progetti che affermano di offrire infrastruttura robotica aperta è la specificità delle scelte architettoniche e il grado in cui quelle scelte sono state fatte con la sostenibilità a lungo termine e l'evoluzione collaborativa come vincoli di design primari piuttosto che come punti di discussione di marketing. Questo non è un progetto che ha preso una piattaforma chiusa esistente e ha aggiunto alcuni componenti open-source o integrazioni blockchain e ha dichiarato risolto il problema dell'apertura. Questa è un'infrastruttura progettata fin dall'inizio attorno alla riconoscenza che la robotica di uso generale richiede meccanismi di governance e coordinamento fondamentalmente diversi dalle piattaforme chiuse che funzionano adeguatamente per casi d'uso industriale controllati.
Il libro mastro pubblico che coordina dati, calcolo e regolazione in Fabric Protocol non è una funzione che potrebbe essere aggiunta a sistemi chiusi senza cambiare le loro dinamiche di potere fondamentali. È la base su cui è costruito tutto il resto e crea un sistema in cui la fiducia deriva dalla verifica piuttosto che dalla reputazione, dove la governance avviene attraverso un consenso trasparente piuttosto che tramite processi interni opachi, e dove l'innovazione può provenire da qualsiasi partecipante piuttosto che essere controllata da un'unica entità che potrebbe avere incentivi in conflitto con la salute a lungo termine dell'ecosistema.
Il riconoscimento onesto che rende questa analisi credibile piuttosto che promozionale è che avere l'architettura corretta per la robotica sostenibile di uso generale non si traduce automaticamente in adozione di mercato, perché l'adozione è determinata da fattori oltre la correttezza tecnica. Gli effetti di rete contano, e le piattaforme chiuse con ampie basi di utenti esistenti e budget di marketing significativi possono mantenere il dominio anche quando le loro fondamenta architettoniche sono meno adatte per la salute a lungo termine dell'ecosistema. La familiarità degli sviluppatori conta, perché la maggior parte dei team che costruiscono sistemi robotici oggi stanno utilizzando strumenti e framework progettati per le assunzioni delle piattaforme chiuse, e passare a un'architettura aperta richiede di apprendere nuovi schemi e accettare attriti nello sviluppo a breve termine in cambio dei benefici di sostenibilità a lungo termine.
Ciò che rende la scommessa sull'infrastruttura aperta credibile nonostante queste sfide di adozione è che i problemi con le piattaforme robotiche chiuse diventeranno sempre più visibili man mano che aumenta la scala delle implementazioni e man mano che le conseguenze del controllo proprietario diventeranno più evidenti per i costruttori, gli utenti e i regolatori. Gli incidenti di sicurezza che avrebbero potuto essere prevenuti con una risposta più rapida della comunità si accumuleranno. L'innovazione che è stata bloccata dai gatekeeper della piattaforma diventerà visibile come opportunità mancate. I costi di lock-in che gli sviluppatori pagano per rimanere su piattaforme che non servono i loro interessi a lungo termine diventeranno troppo elevati per essere ignorati.
Quando quei costi diventano innegabili, la migrazione verso un'infrastruttura aperta non sarà una scelta motivata da una preferenza filosofica o da un'eleganza tecnica. Sarà una necessità pratica guidata dalla riconoscenza che le piattaforme chiuse non possono fornire la sicurezza, la trasparenza e l'evoluzione collaborativa che la robotica di uso generale richiede su larga scala. $ROBO rappresenta la più chiara articolazione di come appare quella infrastruttura aperta in pratica, e se diventerà la base per la prossima generazione di sviluppo robotico o rimarrà un'alternativa tecnicamente superiore che non ha mai raggiunto l'adozione di massa sarà determinato da se il mercato riconosce le limitazioni delle piattaforme chiuse prima che il costo della migrazione diventi insostenibilmente alto.
I sistemi robotici che definiranno il prossimo decennio stanno venendo architettati proprio ora. La scelta tra un'infrastruttura chiusa ottimizzata per il controllo proprietario e un'infrastruttura aperta progettata per l'evoluzione collaborativa è una scelta che non può essere facilmente invertita una volta stabiliti gli effetti di rete. @Fabric Foundation ha costruito l'infrastruttura per il secondo percorso, e i costruttori che scelgono di implementare su quella infrastruttura oggi stanno scommettendo che la sostenibilità e l'apertura conteranno di più nel lungo periodo rispetto ai comfort a breve termine che le piattaforme chiuse offrono attraverso i loro vantaggi proprietari.
#ROBO @Fabric Foundation $ROBO
