
C'est pourquoi lorsque j'ai commencé à m'intéresser à Fabric et à l'écosystème ROBO, j'ai essayé d'ignorer le récit futuriste de la robotique et de me concentrer sur quelque chose de plus simple. Quel véritable problème structurel ce protocole essaie-t-il de résoudre ? Et l'idée plus profonde ici concerne en réalité l'alignement humain-machine. Pas un alignement au sens philosophique, mais un alignement dans les incitations, la coordination et la vérification entre les humains qui demandent du travail et les machines qui l'effectuent.
À mesure que les systèmes robotiques deviennent plus capables, les machines entrent lentement dans de véritables environnements économiques. Entrepôts, systèmes logistiques, automatisation industrielle, même tâches de service. Mais une fois que les machines commencent à effectuer un travail économique, une question inconfortable apparaît. Qui vérifie que le travail a réellement eu lieu. Et qui coordonne des milliers de machines opérant dans différentes entreprises et environnements.
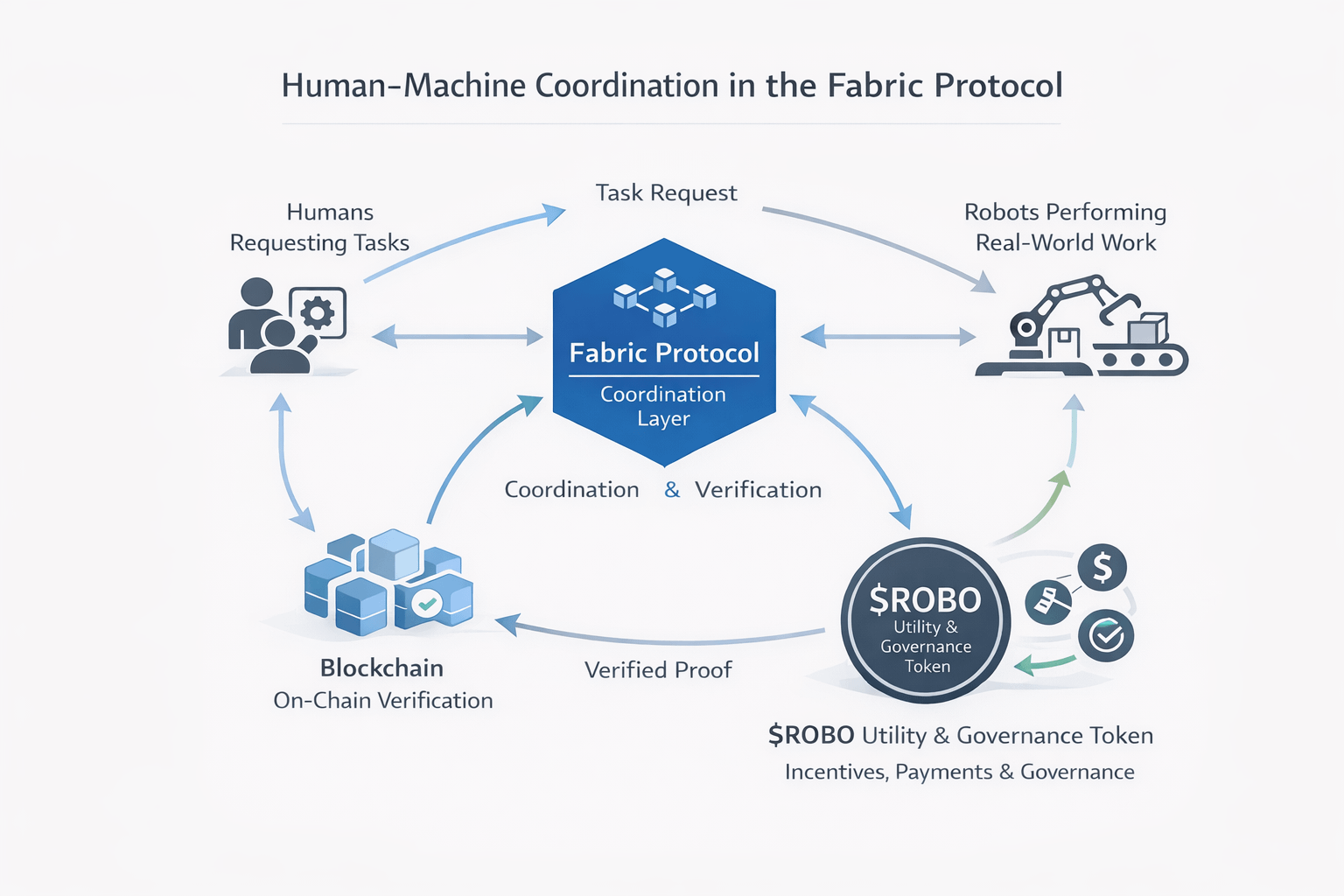
L'approche de Fabric est de construire une couche de coordination blockchain pour ce problème. Au lieu que la base de données interne d'une entreprise agisse comme la source de vérité, les tâches des machines peuvent être enregistrées et vérifiées via un réseau partagé. Un utilisateur demande un travail, une machine exécute la tâche et le résultat est enregistré sur la chaîne. Le règlement économique peut alors se faire par le réseau lui-même. Le jeton ROBO se trouve à l'intérieur de cette couche de coordination liant les incitations, la participation à la gouvernance et l'activité des machines.
Conceptuellement, il ne s'agit pas vraiment de robots. Il s'agit d'une utilisation vérifiable à l'intérieur d'une économie de machines. Si le réseau fonctionne, les développeurs peuvent construire des capacités, les opérateurs peuvent faire fonctionner des machines et les utilisateurs peuvent demander des services sans dépendre d'un système centralisé unique pour confirmer tout. En théorie, cela crée une couche de coordination pour les machines similaire à la façon dont les blockchains coordonnent les transactions financières aujourd'hui.
Mais la théorie est bon marché en crypto. La vraie question revient toujours au problème de la rétention. Les réseaux semblent souvent occupés lorsque les incitations sont fortes. Mining de liquidités, chasse aux airdrops, agriculture de récompenses. Tout cela crée une activité on-chain massive dans la phase initiale. Ensuite, les incitations s'estompent et soudainement l'activité disparaît. Ce qui reste, c'est l'utilisation réelle.
Regarder les données du marché actuel donne une image approximative de la position de ROBO aujourd'hui. CoinMarketCap montre le jeton circulant sur le marché avec un cadre d'approvisionnement total dans les milliards et une capitalisation boursière fluctuant dans les dizaines de millions de dollars. Le volume de transactions quotidien a également été récemment actif dans la gamme des dizaines de millions, ce qui indique que les traders prêtent attention. Les données on-chain de BaseScan montrent des milliers de détenteurs et des transferts de jetons constants circulant dans le réseau. L'activité existe. Mais la question clé est de savoir si cette activité représente de la spéculation ou une véritable infrastructure se formant en dessous.
Il existe également plusieurs risques qui restent silencieusement autour du projet.
Le premier risque est l'accélération narrative. Les jetons de robotique et d'IA sont actuellement l'une des histoires de marché les plus fortes. Lorsque les récits sont chauds, le capital circule rapidement et les prix avancent souvent avant de réels progrès.
Le deuxième risque est la conception des incitations. Si l'activité précoce du réseau dépend fortement des récompenses, le système pourrait montrer une activité on-chain impressionnante maintenant mais avoir du mal à maintenir la rétention une fois les incitations estompées.
Le troisième risque est le développement de l'écosystème. Fabric dépend des développeurs construisant des capacités robotiques et des opérateurs déployant des machines qui interagissent avec le réseau. Sans ces participants, la couche de coordination n'a rien de significatif à coordonner.
Et le quatrième risque est la vérification elle-même. Vérifier le travail dans le logiciel est simple. Vérifier le travail effectué par des machines physiques dans des environnements imprévisibles est beaucoup plus difficile.
À cause de cela, les signaux que je surveille sont en réalité assez ennuyeux. Transactions répétées des mêmes portefeuilles semaine après semaine. Des frais petits mais constants sont générés. Des semaines calmes où le prix ne fait rien mais l'activité on-chain continue quand même. Ces motifs mettent du temps à apparaître, mais ils signalent généralement une véritable infrastructure se formant sous la narration.
Donc, quand je regarde Fabric, je ne vois pas un échange narratif rapide. Je vois un pari d'ingénierie. Soit la coordination décentralisée pour les machines devient finalement nécessaire, soit les plateformes centralisées continuent à dominer les économies de machines.
Si Fabric commence à produire une utilisation vérifiable constante longtemps après que les incitations se sont estompées, cela sera la véritable preuve.
Curieux de savoir comment les autres y pensent. Lorsque vous évaluez un nouveau réseau, quels signaux vous convainquent que l'activité on-chain est réelle et non simplement motivée par des incitations. Et si les machines commencent à participer à des réseaux économiques, pensez-vous que la vérification décentralisée aura réellement de l'importance.
@Fabric Foundation $ROBO #Fabric #ROBO #CryptoAnalysis #OnChainActivity #MachineEconomy