Primero escuché sobre la Fabric Foundation mientras navegaba por actualizaciones sobre proyectos de infraestructura descentralizada, y mi reacción inicial fue de escepticismo. Supuse que esto era solo otra capa de blockchain intentando forzar la criptografía en IA y robótica sin abordar las realidades desordenadas del hardware en el mundo real. Después de todo, hemos visto muchas ideas de DePIN que suenan revolucionarias pero luchan con la ejecución práctica. Lo que cambió mi perspectiva fue sumergirme en su documentación de protocolo y ver cómo abordan la asignación de capital para activos físicos. No era tokenómica abstracta; era un enfoque reflexivo para financiar y operar robots colectivamente. Esto me llevó directamente a la economía del arrendamiento de robots en el ecosistema Fabric, donde la participación descentralizada podría redefinir cómo desplegamos mano de obra automatizada.
La industria de la robótica enfrenta un desafío central: desplegar robots a gran escala es intensivo en capital y operativamente complejo. Imagina una empresa de logística que quiera automatizar tareas de almacén; comprar robots humanoides directamente podría costar cientos de miles por unidad, además del mantenimiento y la integración continuos. Arrendar ayuda, pero los modelos tradicionales te atan a proveedores centralizados con precios opacos y personalización limitada. ¿Cómo compiten los jugadores más pequeños? Esto se alinea con las narrativas más amplias de Web3 sobre la integración de IA y el rendimiento real. A medida que los agentes de IA se vuelven más autónomos, necesitamos modelos económicos que distribuyan costos y recompensas de manera justa, evitando los silos de las grandes tecnologías. El enfoque de Fabric se vincula a esto creando una red donde los robots no son solo herramientas, sino participantes económicos, generando rendimientos verificables a través de la finalización de tareas en lugar de hype especulativo.

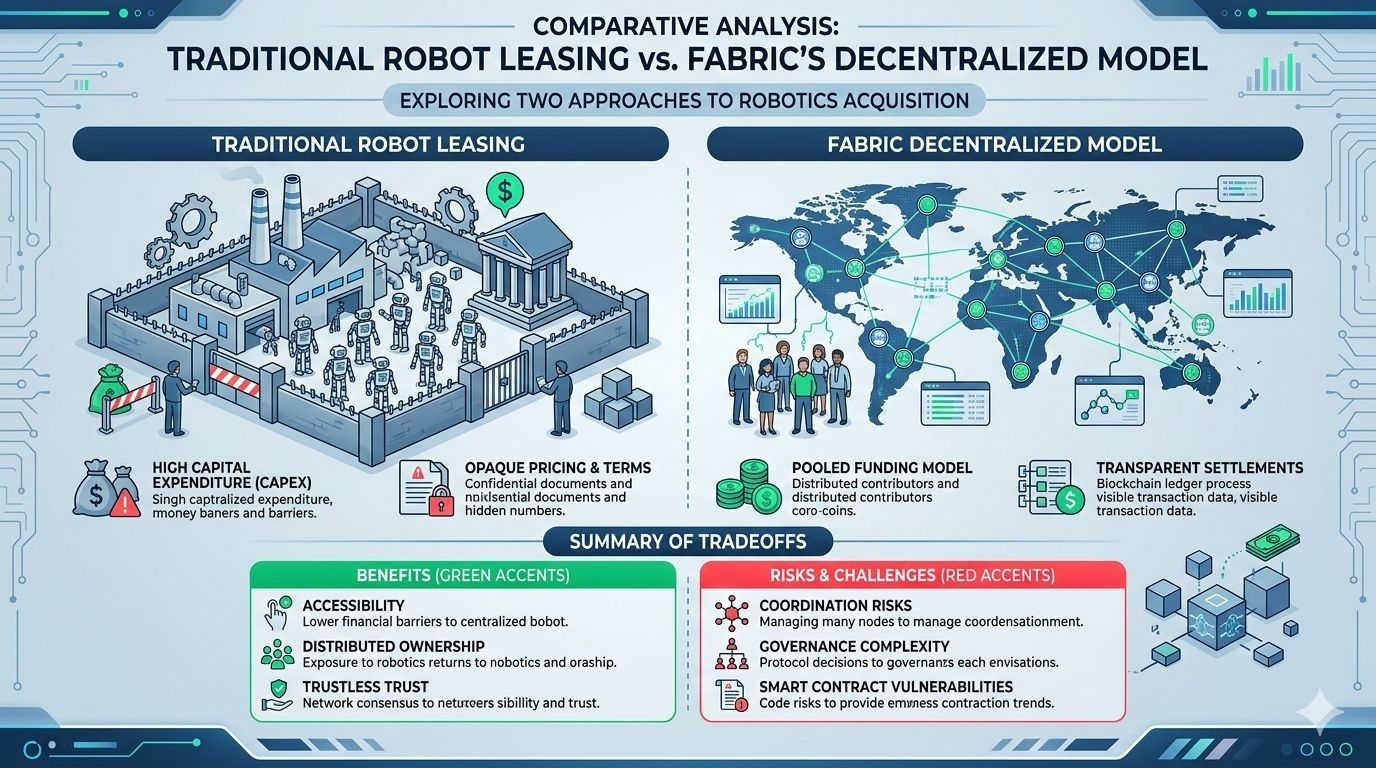
En el ecosistema de Fabric, el arrendamiento de robots opera a través de una capa de coordinación descentralizada. Comienza con los usuarios depositando stablecoins en grupos que financian la compra y el despliegue de flotas de robots. La comunidad luego asume roles operativos; piensa en estaciones de carga, horarios de mantenimiento, algoritmos de enrutamiento y verificaciones de cumplimiento, todo gobernado por el protocolo. Los empleadores que necesitan servicios de robots pagan en $ROBO, el token nativo, que maneja los asentamientos por tareas completadas. Esto crea un mercado donde los robots se arrendan efectivamente bajo demanda, con tarifas que fluyen de regreso para apoyar la red. No se trata de poseer hardware individualmente; es una asignación colectiva, asegurando que los robots se utilicen de manera eficiente sin un capital inicial masivo de ninguna entidad individual.
Compara esto con el arrendamiento tradicional de robots, como los ofrecidos por empresas en el mercado de humanoides, donde los costos anuales pueden alcanzar los $100,000 por unidad a través de contratos bilaterales con fabricantes. Esos modelos dependen de capital privado para los gastos iniciales y equipos internos para las operaciones, lo que genera barreras más altas para la entrada y menos flexibilidad. Fabric cambia esto al descentralizar la financiación y las operaciones; los depósitos en stablecoin democratizan el acceso, y la verificación en blockchain asegura una asignación de tareas transparente. Sin embargo, Fabric introduce compensaciones en las estructuras de incentivos: mientras que el arrendamiento tradicional garantiza soporte dedicado, Fabric depende de la participación de la comunidad, lo que podría llevar a variabilidad en el tiempo de actividad. Otro ángulo es compararlo con proyectos DePIN como Render para computación; Fabric extiende esto a robots físicos, fusionando incentivos digitales con hardware del mundo real, pero exige asociaciones off-chain más fuertes.
Profundizando más, una visión única es cómo el modelo de Fabric podría fomentar "eficiencia emergente" en la economía de robots; al agrupar recursos, el ecosistema reduce el tiempo ocioso para los robots, lo que podría disminuir los costos efectivos de arrendamiento por debajo de los estándares centralizados. Pero hay un costo oculto: la sobrecarga de coordinación. Las operaciones descentralizadas significan confiar en contribuyentes distribuidos para el mantenimiento, lo que podría introducir retrasos o inconsistencias si la participación disminuye. En el lado positivo, los ingresos del protocolo al recomprar $ROBO crean un volante para el rendimiento real, recompensando a los primeros contribuyentes sin prometer propiedad directa. ¿El riesgo? Si la adopción en el mundo real se retrasa, esos fondos podrían tener un rendimiento inferior, destacando la tensión entre los ideales de blockchain y la logística física.
El espacio no está exento de obstáculos; escalar flotas de robots descentralizados requiere tecnología en maduración como computación verificable para la validación de tareas, además de navegar regulaciones para máquinas autónomas. Asociaciones para seguros y contratos de servicio son cruciales, ya que las fallas de hardware no pueden ser solucionadas solo con código. A largo plazo, la transparencia en el diseño de Fabric es importante porque genera confianza en una industria propensa a prometer en exceso. Al centrarse en la gobernanza abierta en lugar de ecosistemas cerrados, Fabric establece una base fundamental para la automatización sostenible, posicionándose como un bloque de construcción para futuras economías de IA en lugar de una victoria rápida.
Para hacer esto accionable, he desarrollado el "Marco de Arrendamiento de Robots al Estilo Fabric"—un modelo reutilizable para evaluar economías de robots descentralizadas. Aquí está la lista de verificación de 3 puntos: 1. Accesibilidad Financiera: ¿Permite el sistema una amplia participación en la asignación de capital, como grupos de stablecoin, para reducir las barreras de entrada? 2. Resiliencia Operativa: ¿Están alineados los incentivos para un mantenimiento y tiempo de actividad consistentes, con pruebas verificables para minimizar el tiempo de inactividad? 3. Transparencia de Rendimiento: ¿Cómo se distribuyen los ingresos—mediante recompras o recompensas directas—y se declaran claramente las compensaciones como la participación no transferible?
Mientras observamos la intersección de la robótica con Web3, ¿qué restricción del mundo real que ha sido pasada por alto crees que podría hacer o deshacer modelos de arrendamiento de robots descentralizados como el de Fabric?
@Fabric Foundation #Robo