@Fabric Foundation #ROBO $ROBO

Robots are increasingly doing real work in the physical world. Warehouse machines move goods across logistics centers. Delivery robots travel sidewalks. Agricultural machines monitor crops and apply fertilizer. All of these activities generate data about what the machines actually did — where they went, what tasks they completed, and whether those tasks happened correctly.
The problem is that most of this data stays inside private systems. Companies store it in internal databases, and outside parties simply trust that the information is accurate. The Fabric network is built around a different idea: robot activity can be verified and recorded on-chain so that machines, companies, and software agents can coordinate using shared, verifiable data.
That sounds simple at first. A robot does something, and the result appears on a blockchain. But once you look closer, the real challenge becomes obvious: blockchains cannot see the physical world. They only process digital information. Fabric therefore needs a mechanism that turns real-world robot activity into verifiable on-chain proof.
The basic verification challenge
A robot might claim that it delivered a package, inspected a warehouse shelf, or cleaned a floor area. Without verification, those claims are just messages. Any system could fake them.
Fabric addresses this by building a verification layer that connects robots, sensors, and cryptographic proofs. The robot collects evidence from its sensors — things like GPS position, camera snapshots, or task logs. That data is then packaged into a structured report that can be verified before being recorded on-chain.
The blockchain itself doesn’t store all the raw sensor data. That would be inefficient and expensive. Instead, Fabric stores proofs that the data exists and that it passed verification checks.
A proof, in this case, is essentially a cryptographic fingerprint of the robot’s activity record. If anyone later wants to audit what happened, they can compare the stored proof with the underlying data.
So the chain doesn’t say everything that happened. It says something closer to:
“This robot produced evidence that it completed this task, and that evidence passed verification rules.”
That distinction matters.
Turning robot activity into verifiable events
Fabric treats robot actions as structured events. Each event contains a few key elements:
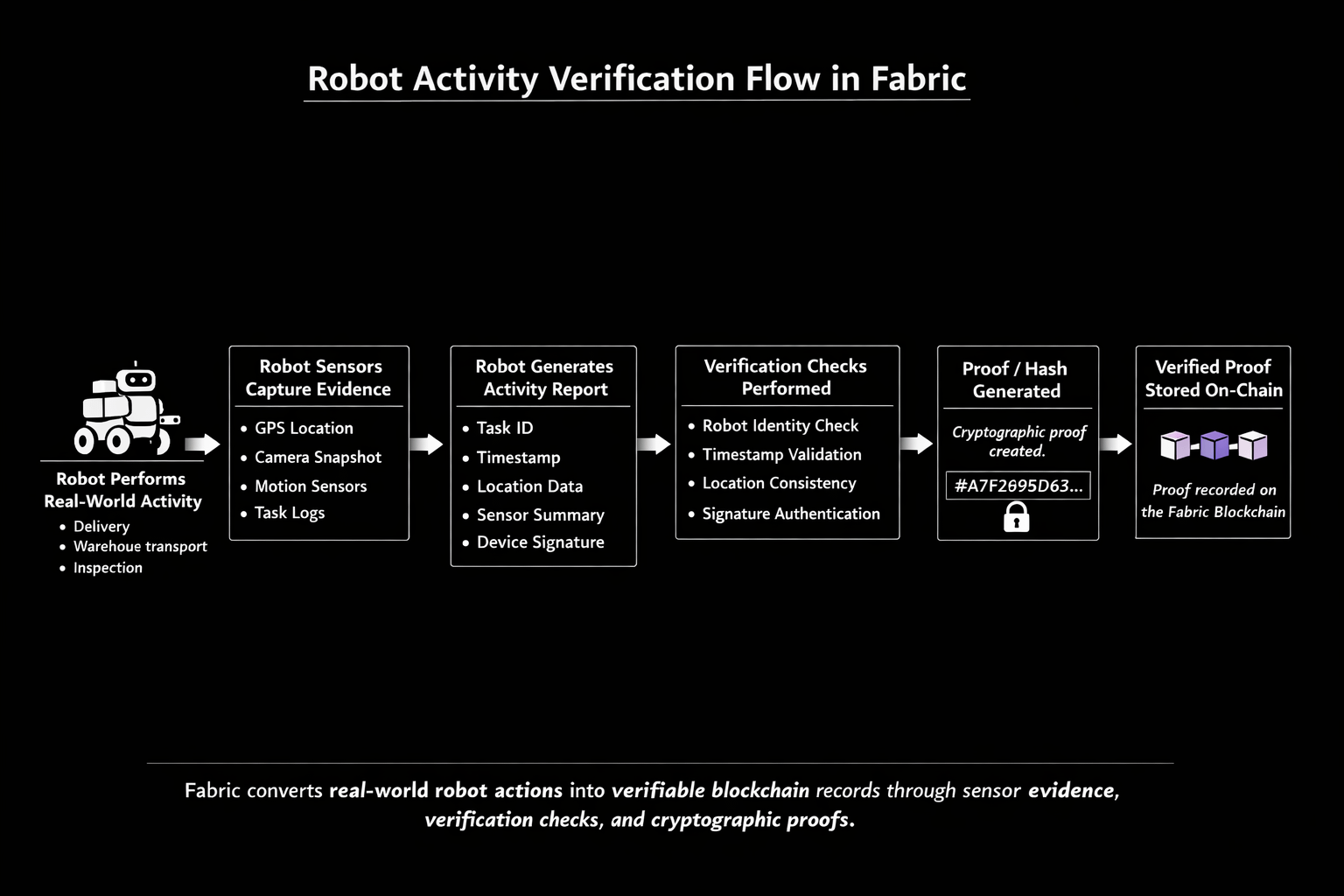
The robot’s identity
The task it claims to have completed
Sensor evidence supporting the claim
A timestamp and location reference
A cryptographic signature from the robot’s hardware
Once an event is created, it moves through a validation process before reaching the blockchain.
Some checks happen automatically. For example, the system can verify that the robot’s signature matches a registered device. It can also check that timestamps make sense or that location data is consistent.
Other checks depend on external infrastructure. Fabric might compare robot data with information from nearby sensors, network beacons, or trusted hardware modules.
Only after these checks does the event become part of the on-chain record.
The process is a bit slower than simply writing data to a database, but the tradeoff is stronger verification.
Example: warehouse robots reporting completed tasks
Imagine a group of warehouse robots moving packages between storage shelves and packing stations.
Each robot is assigned tasks by a logistics system. When a robot completes a delivery run, it generates an event describing what it did. The event includes its path, timestamps, and confirmation that the package reached the correct station.
In a traditional system, this information would remain inside the warehouse software. Fabric changes the dynamic by turning the task completion into an on-chain proof.
Why would that matter?
Because multiple parties might depend on the result. A supplier might want confirmation that goods were moved into storage. A shipping partner might require verification that a package reached the dispatch area. A payment system could even release funds once the task is verified.
Instead of trusting a single company’s internal database, these parties rely on a shared record backed by cryptographic proofs.
Of course, the robot still needs to generate reliable data. If the sensors are wrong, the system could still produce incorrect records. Fabric reduces trust requirements, but it doesn’t eliminate them entirely.
Example: delivery robots proving route completion
A second scenario involves autonomous delivery robots operating in a city.
Suppose a local service uses small sidewalk robots to deliver groceries. Each robot must prove that it actually reached a customer’s location.
In Fabric’s model, the robot logs its route using GPS data, motion sensors, and possibly camera snapshots taken at delivery time. The robot then creates a proof package that represents the completed route.
The system checks whether the route data matches known delivery coordinates and whether the robot’s hardware signature is valid. If everything passes verification, a record of the delivery event is written to the chain.
A payment contract could then release the delivery fee automatically.
This setup reduces disputes. If a customer claims that the robot never arrived, the recorded evidence can be inspected. It’s not perfect proof — GPS errors and sensor noise still exist — but it’s stronger than a simple delivery log stored on a company server.
Why Fabric doesn’t store everything
At first glance, it might seem logical to store all robot data directly on-chain. After all, blockchains are meant to preserve records.
In practice, this approach quickly becomes impractical.
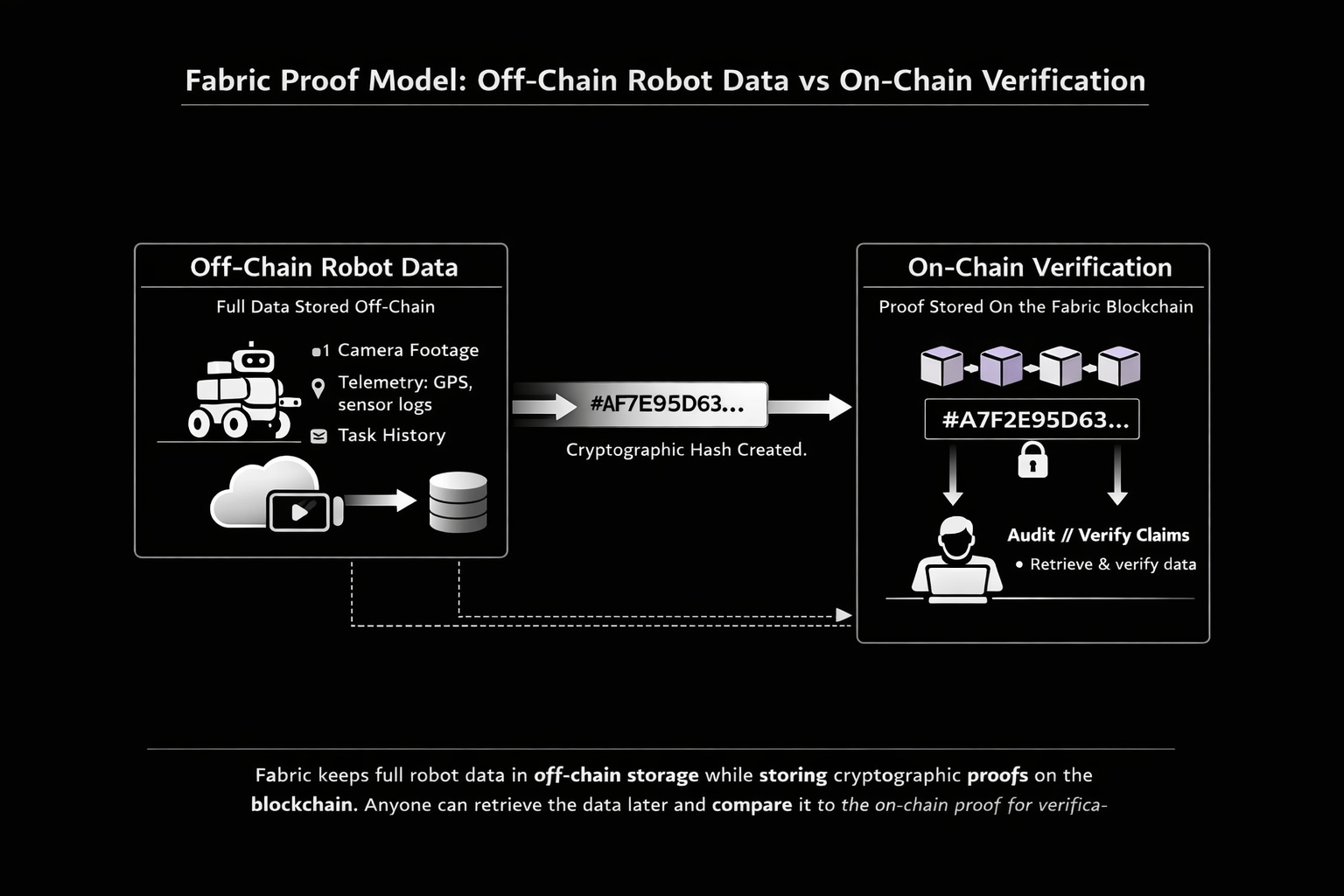
Robots generate huge volumes of data. Camera footage alone could produce gigabytes per hour. Even simpler telemetry streams — position, speed, sensor readings — accumulate quickly.
Fabric therefore separates evidence storage from proof storage. The blockchain records proofs, while the detailed data lives in external storage systems.
This structure keeps the chain efficient while still allowing audits. Anyone who wants to verify a claim can retrieve the original data and compare it with the stored proof.
It’s a compromise between transparency and practicality.
The navoidable trust problem
Even with verification layers, Fabric still faces a fundamental limitation: robots themselves can be compromised.
If someone modifies a robot’s software or tampers with its sensors, the machine could produce convincing but false data. The system might verify the cryptographic signatures while the underlying information remains incorrect.
Hardware security modules help reduce this risk. These components store cryptographic keys and prevent unauthorized software from signing events. But no system is completely immune to manipulation.
There’s also the question of sensor reliability. GPS signals drift. Cameras can be obstructed. Environmental conditions can affect measurements.
Fabric’s verification process can detect obvious inconsistencies, yet subtle errors may still pass through.
So the chain ends up storing records that are verifiable, but not necessarily perfectly accurate.
Latency and operational tradeoffs
Another practical tradeoff involves timing.
Robots often operate in real time. They navigate obstacles, coordinate with other machines, and make quick decisions.
Blockchain systems, however, operate on slower confirmation cycles. Recording an event on-chain takes time, especially if multiple verification steps are involved.
Fabric works around this by separating operational decisions from recordkeeping. Robots can continue working while verification happens asynchronously. The chain becomes more of an audit layer than a control system.
That design keeps robots responsive, but it also means the blockchain record may lag slightly behind real-world events.
A different way to trust machine activity
Fabric’s verification approach is not really about replacing human trust entirely. It’s about shifting where that trust sits.
Instead of trusting a single company’s logs, the system distributes verification across hardware signatures, sensor evidence, and blockchain proofs.
For industries where machines perform valuable tasks — logistics, delivery, infrastructure inspection — that shift could matter. A robot’s work becomes something that multiple parties can independently verify.
Still, the deeper question remains unresolved. Robots observe the world through sensors, and sensors are imperfect.
When a machine claims it completed a task, Fabric can show how that claim was verified. Whether the evidence truly reflects reality is a more complicated question — one that the blockchain alone can’t fully answer.